5 p arámetr os de mecanizado – HEIDENHAIN CNC Pilot 4290 Manual del usuario
Página 378
7 Parámetros
366
7.5 P
arámetr
os de mecanizado
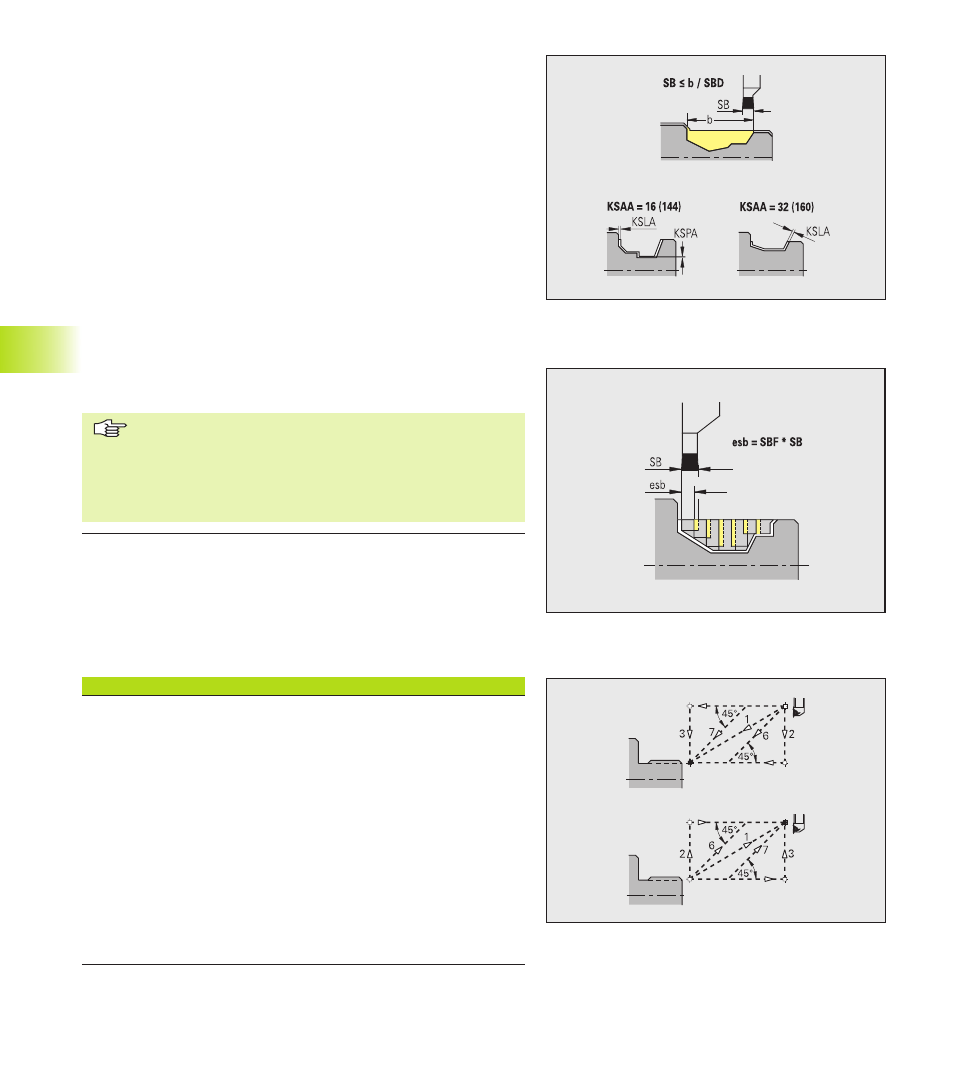
Penetrar - selección de herramientas, demasías
Si en el tipo de mecanizado penetración de contorno sólo existen
elementos lineales, pero ningún elemento paralelo al eje en la base
de la penetración, la selección de la herramienta se efectúa en base
al ”divisor de ancho de penetración SDB”.
■
Divisor de ancho de tronzado [SBD]
SB <= b / SBD (SB: ancho de herramienta de tronzado; b: ancho de
la zona de mecanizado)
■
Tipo de demasía [KSAA]– al campo de penetración a mecanizar
se le pueden asignar demasías. Si están definidas demasías, se
profundiza la garganta y en un segundo paso se realiza el
acabado. Introducciones:
■
16: demasía transversal/longitudinal diferentes - sin demasías
individuales
■
144: demasía transversal/longitudinal diferentes - con demasías
individuales
■
32: demasía equidistante – sin demasías individuales
■
160: demasía equidistante – con demasías individuales
■
Equidistante o longitudinal [KSLA]: demasía equidistante o
demasía longitudinal
■
Ninguna o transversal [KSPA]: demasía transversal
■
Las dimensiones se tienen en cuenta en el tipo de
mecanizado tronzar contorno en bajadas del contorno.
■
Tronzado normalizado (ejemplo: Forma D, S, A) se
terminan de tronzar en un paso de trabajo. Una
subdivisión en desbaste y acabado sólo es posible en
DIN PLUS.
Penetrar y penetración de contorno - mecanizado
Evaluación: DIN PLUS
■
Factor de ancho de penetración [SBF] – Para calcular la
desviación máxima en ciclos de penetración (G860, G866).
Se tiene: esb = SBF * SB (esb: ancho de penetración efectivo
(desviación); SB: ancho de herramienta de penetración)
7 – Torneado de roscas
Torneado de roscas - aproximación y salida
■
Aproximación exterior - rosca [ANGA]
■
Aproximación interior - rosca [ANGI]
■
Salida exterior - rosca [ABGA]
■
Salida interior - rosca [ABGI]
Tipo de arranque/de parada:
■
1: dirección X- y Z simultáneos
■
2: primero en dirección X- a continuación dirección Z
■
3: primero dirección Z- a continuación dirección X
■
6: movimiento de acoplamiento, dirección X- antes de la
dirección Z
■
7: movimiento de acoplamiento, dirección Z- antes de la
dirección X
Los movimientos de arranque y de parada tienen lugar en marcha
rápida (G0).