12 funciones especiales – HEIDENHAIN CNC Pilot 4290 Manual del usuario
Página 174
4 DIN PLUS
162
4.12 Funciones especiales
A partir de la versión de software 368 650-08. la función
„Desplazamiento a tope fijo“puede ser utilizada también
para el eje C.
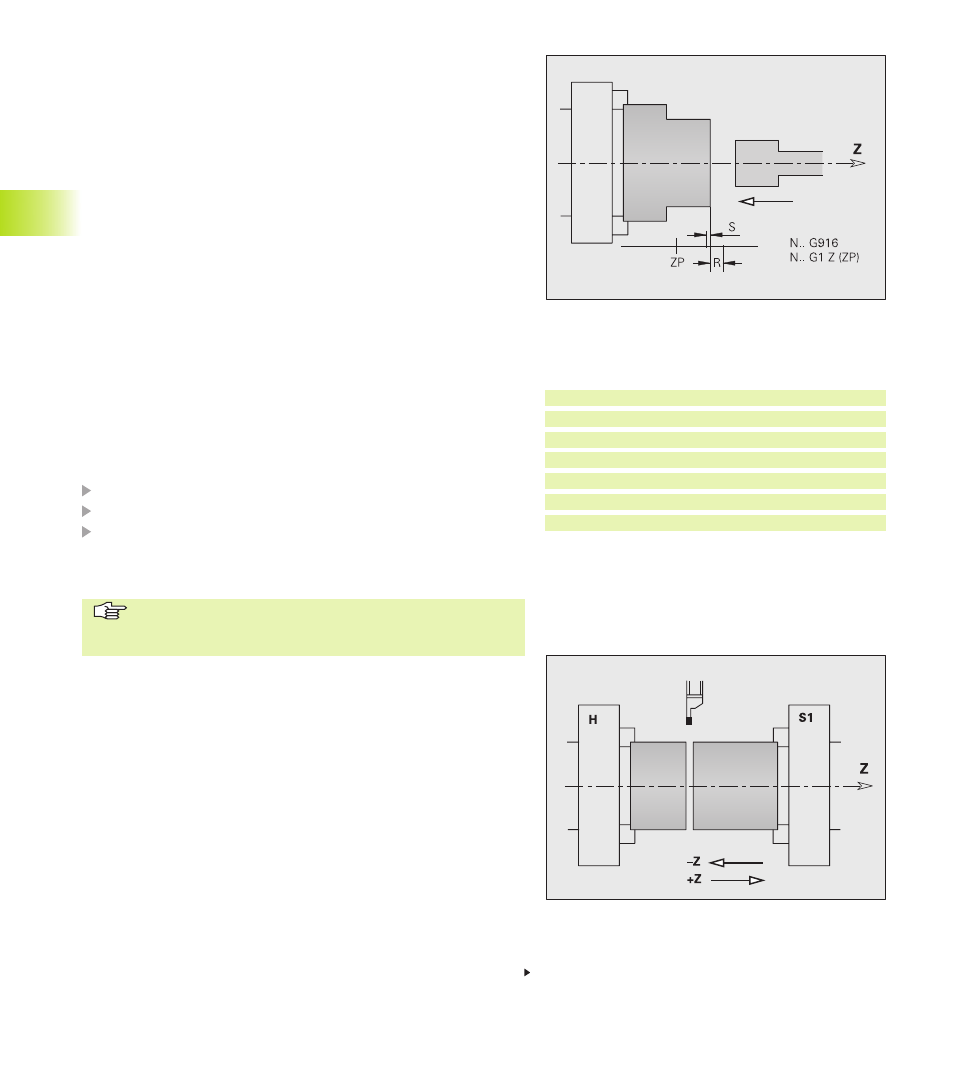
Desplazamiento a tope fijo G916
G916 activa la ”supervisión del recorrido de desplazamiento”. Se
desplaza a continuación con G1 a un „Tope fijo“. El CNC PILOT para
el carro, una vez que se ha alcanzado el „error de arrastre“
memoriza la posición y retrocede a la eliminación de tensión en la
„trayectoria reversible“.
Ejemplo de aplicación
Entrega de una pieza premecanizada con el segundo cabezal
desplazable cuando la posición de la pieza no se conoce
exactamente.
En los parámetros de máquina 1112, 1162, .. se determina:
■
Límite de error de arrastre (para reconocer el tope fijo)
■
Trayectoria de inversión
El CNC PILOT
■
fija el sobrepaso de avance al 100%
■
se desplaza al tope fijo y se para una vez que se alcanza el
„error de arrastre“ – se borra la trayectoria de desplazamiento
restante
■
memoriza la „Posición tope“ en las variables V901..V918
■
retrocede a la „Trayectoria reversible“
■
crea una „Parada de interpretación“
Instrucciones de programación:
Posicionar los carros a una distancia suficiente del „tope“
G916 programar con una frase de desplazamiento G1
G1 .. programar como sigue:
■
La posición final se encuentra detrás del tope fijo
■
desplazar sólo un eje
■
debe estar activado el desplazamiento por minutos (G94)
Control de tronzado mediante la supervisión del
error de arrastre G917
El control de tronzado sirve para evitar colisiones en los procesos
de tronzado no completados. G917 ”supervisa” el recorrido de
desplazamiento.
Aplicación
■
Control de tronzado
Desplazar la pieza tronzada en la dirección ”+Z”. Si aparece un
error de arrastre, la pieza consta como no tronzada.
■
Prueba ”tronzado sin apéndice”
Desplazar la pieza tronzada en dirección ”–Z”. Si aparece un error
de arrastre, la pieza consta como no tronzada correctamente.
En los parámetros de máquina 1115, 1165, .. se determina:
■
limite del error de arrastre
■
avance del ”recorrido de desplazamiento supervisado”
Continuación en la página siguiente
ZP: Posición de destino del desplazamiento
S:
Límite del error de arrastre
R:
Recorrido reversible
Ejemplo
. . .
N.. G94 F200
$2 N.. G0 Z20 [Preposicionar carro 2]
$2 N.. G916 G1 Z-10 [Activar control,
desplazar a tope fijo]
. . .