E.3 tabla de configuración del usuario – Yaskawa CIMR-LE Manual del usuario
Página 503
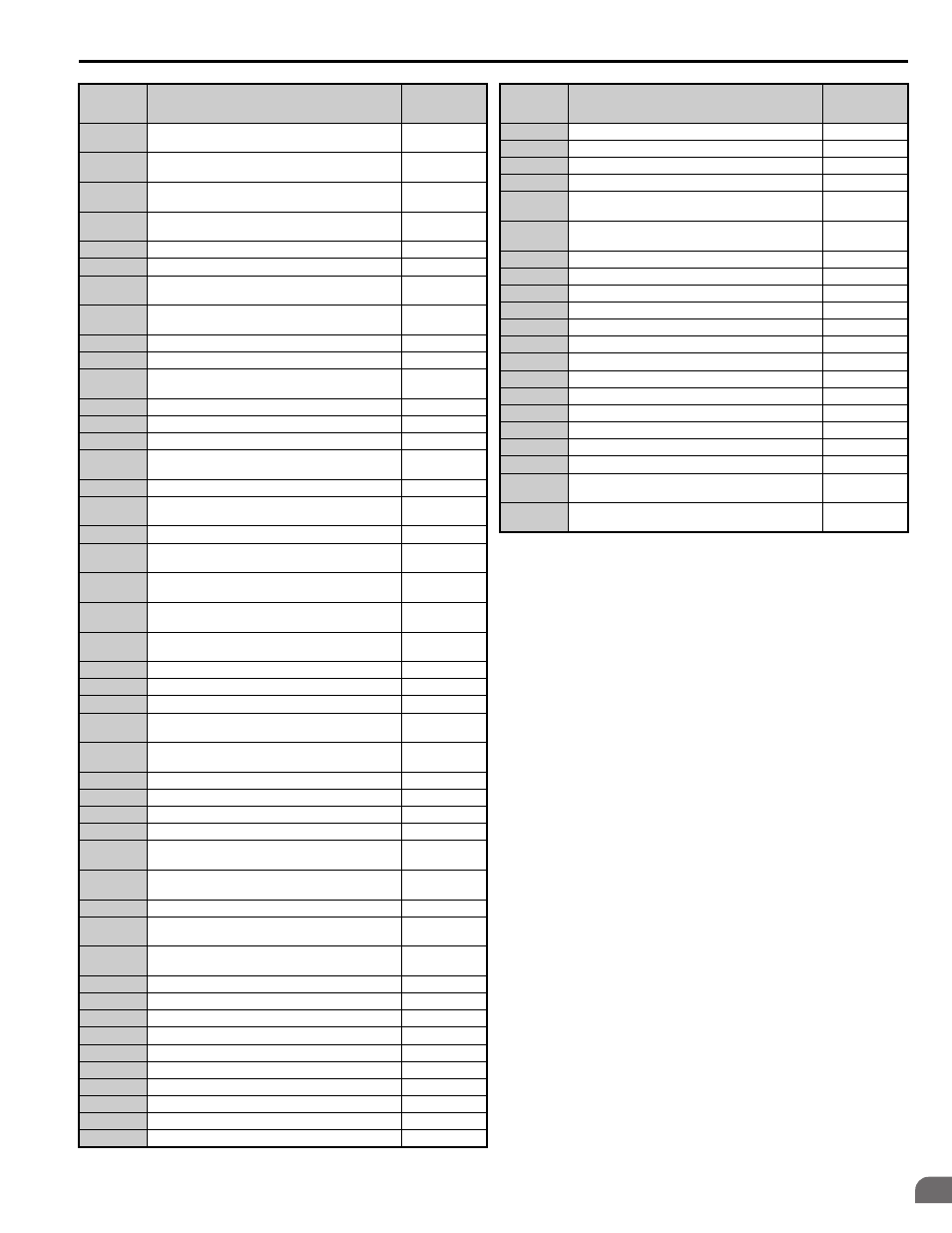
E.3 Tabla de configuración del usuario
YASKAWA SISP YAIL1E 01A YASKAWA Variador CA L1000E Manual técnico
503
E
S3-27
Valor de compensación de torque con condición de carga
1
S3-28
Valor de Compensación de Torque con Condición de
Carga 2
S3-29
Entrada analógica de la celda de carga con condición de
carga 1
S3-30
Entrada analógica de la celda de carga con condición de
carga 2
S3-34
Derivación 1 del Torque Antirretroceso
S3-35
Derivación 2 del Torque Antirretroceso
S3-37
Nivel de desviación de la posición para aplicar la
derivación del torque antirretroceso 1
S3-38
Nivel de desviación de la posición para aplicar la
derivación del torque antirretroceso 2
S3-39
Ganancia Integral Antirretroceso
S3-40
Detección del movimiento antirretroceso
S3-41
Ganancia del bloqueo de posición en la reducción de
inicio
S4-01
Selección de búsqueda de dirección de carga ligera
S4-02
Método de búsqueda de dirección de carga ligera
S4-03
Tiempo de búsqueda de dirección de carga ligera
S4-04
Referencia de velocidad de búsqueda de dirección de
carga ligera
S4-05
Límite de torque de la operación de rescate
S4-06
Selección del Suministro de Energía de la Operación de
Rescate
S4-07
Energía UPS
S4-08
Selección del Límite de Velocidad de Operación de la
UPS
S4-12
Tensión del barraje de bus durante la Operación de
Rescate
S4-13
Nivel de detección del deterioro del suministro eléctrico
de la operación de rescate
S4-15
Selección de referencia de velocidad en la operación de
rescate
S5-01
Selección de operación de piso corto
S5-02
Velocidad nominal para el cálculo de piso corto
S5-03
Tiempo de velocidad de constante mínima de piso corto
S5-04
Ganancia del tiempo de aceleración del cálculo de la
distancia
S5-05
Ganancia del tiempo de desaceleración del cálculo de la
distancia
S5-10
Selección del método de paro
S5-11
Distancia de desaceleración
S5-12
Distancia de paro
S5-13
Nivel de velocidad mínimo de aterrizaje directo
S6-01
Selección de detección/restablecimiento del error de
respuesta del contactor del motor (SE1)
S6-02
Tiempo de retardo de detección del error de corriente de
arranque (SE2)
S6-03
Nivel de corriente de detección SE2
S6-04
Tiempo de retardo de detección del error de corriente de
salida (SE3)
S6-05
Tiempo de detección del error de respuesta del freno
(SE4)
S6-10
Nivel de Detecciónde Sobreaceleración
S6-11
Tiempo de Detección de Sobreaceleración
S6-12
Selección de la Detección de Sobreaceleración
S6-15
Detección de Pérdida de Referencia de Velocidad
S6-16
Reinicio después de la Selección de Bloqueo de Base
T1-00
Selección del motor 1/motor 2
T1-01
Selección del modo auto-ajuste
T1-02
Potencia nominal del motor
T1-03
Tensión nominal del motor
T1-04
Corriente nominal del motor
N.º
Nombre
Configuración
del
usuario
T1-05
Frecuencia base del motor
T1-06
Cantidad de polos del motor
T1-07
Velocidad base del motor
T1-08
Resolución del codificador (pulsos por revolución)
T1-09
Corriente sin carga del motor (Autoajuste estacionario 1
y 2)
T1-10
Deslizamiento nominal del motor (Autoajuste
estacionario 2)
T2-01
Selección del modo de autoajuste
T2-04
Potencia nominal del motor
T2-05
Tensión nominal del motor
T2-06
Corriente nominal del motor
T2-08
Cantidad de polos del motor
T2-09
Velocidad base del motor
T2-10
Resistencia del estator monofásico
T2-11
Inductancia del eje d del motor
T2-12
Inductancia del eje q del motor
T2-13
Selección de unidad constante de tensión inducida
T2-14
Constante de tensión inducida del motor
T2-16
Resolución del codificador
T2-17
Compensación del codificador
T2-18
Referencia de velocidad para el autoajuste de las
características del codificador PG-E3
T2-19
Dirección de rotación para el autoajuste de las
características del codificador PG-E3
N.º
Nombre
Configuración
del
usuario