S5-10: selección del método de paro, 11 s: parámetros del elevador, Selecciona el método de paro – Yaskawa CIMR-LE Manual del usuario
Página 276: Control de distancia de nivelación
5.11 S: Parámetros del elevador
276
YASKAWA SISP YAIL1E 01A YASKAWA Variador CA L1000E Manual técnico
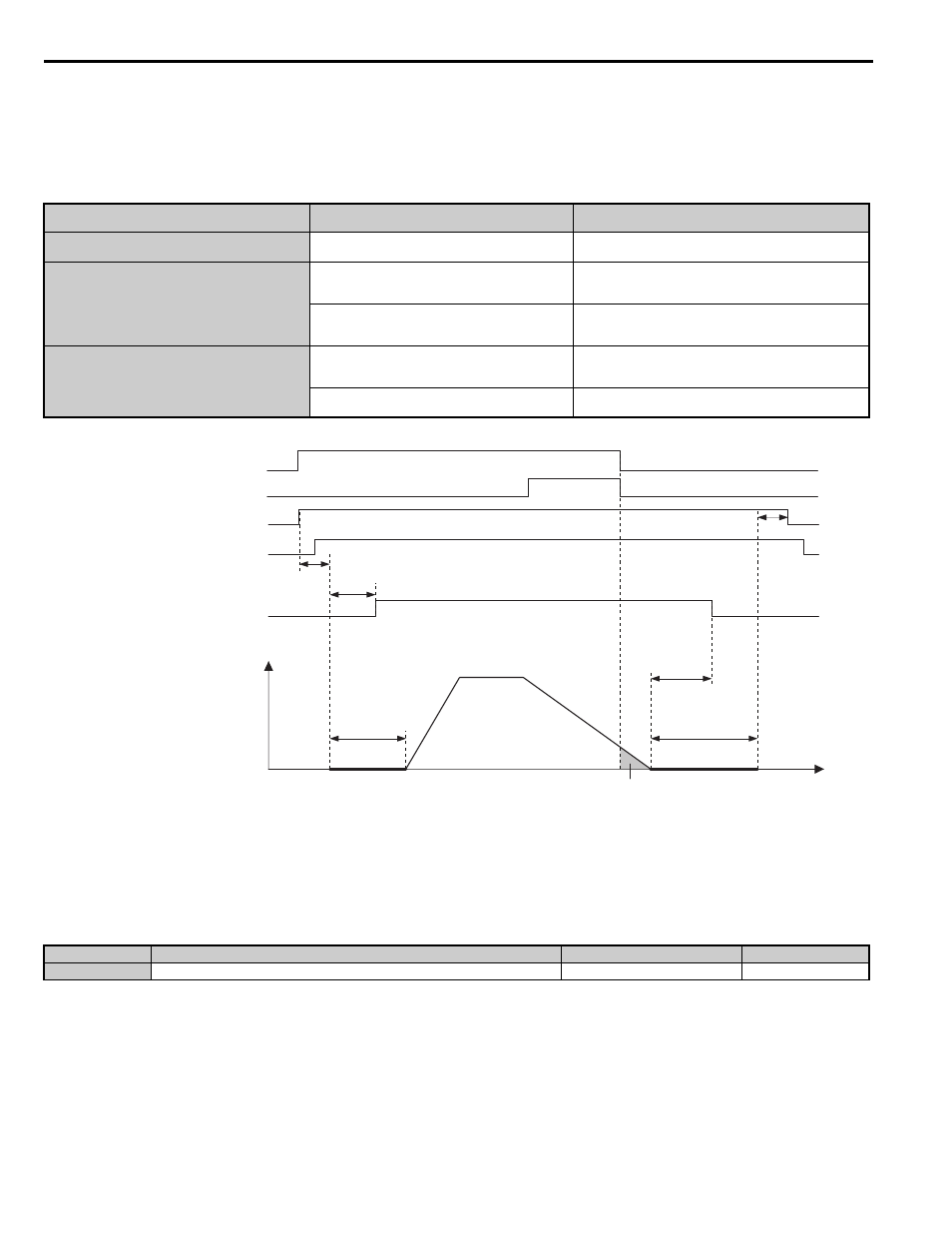
Control de Distancia de Nivelación
El Control de Distancia de Nivelación (S5-10 = 2) utiliza la referencia de velocidad de nivelación para la distancia
restante para llegar al piso designado. El Control de Distancia de Nivelación se activa cuando se cumplen las condiciones
enumeradas en la
Tabla 5.16 Operación del Control de Distancia de Nivelación
Figura 5.50 Ejemplo de Secuencia de Operación para el Control de la Distancia de Nivelación
■
S5-10: Selección del Método de Paro
Selecciona el método de paro.
Configuración 0: Desactivar
Configuración 1: Aterrizaje directo
Configuración 2: Control de Distancia de Nivelación
Selección de la Prioridad de Velocidad
Configuración del terminal de entrada de
multifunción
Condiciones de Inicio del Control de la Distancia de
Nivelación
Secuencia de velocidad de múltiples pasos
(d1-18 = 0, 3)
–
El comando Arriba/Abajo no está activo o la referencia de
velocidad es 0.
La referencia de velocidad alta tiene prioridad
(d1-18 = 1)
La referencia de velocidad de nivelación está seleccionada
(H1- = 53).
El comando Arriba/Abajo no está activo o todos los terminales de
entrada configurados para
H1- = 50 a 53 están abiertos.
La referencia de velocidad de nivelación no está
seleccionada
(H1-
53).
El comando Arriba/Abajo no está activo.
Secuencia de velocidad de múltiples pasos
(d1-18 = 2)
La referencia de velocidad nominal está seleccionada
(H1- = 50).
El comando Arriba/Abajo no está activo o todos los terminales de
entrada configurados para
H1- = 50 a 53 están abiertos.
La referencia de velocidad nominal no está seleccionada
(H1-
50).
El comando Arriba/Abajo no está activo.
<1> Área S es la distancia de paro (S5-12) desde el punto en el cual la operación de compensación se complete hasta cuando el carro llega al piso
designado.
N.º
Nombre del parámetro
Rango de configuración
Predeterminado
S5-10
Selección del método de paro
0 a 2
0
S
<1>
ON (encendido)
OFF (apagado)
OFF (apagado)
OFF (apagado)
OFF
(apagado)
ON (encendido)
ON (encendido)
ON (encendido)
Tiempo de retardo del comando Marcha (S1-10).
Tiempo de Retardo de Liberación del Freno
(S1-06)
Tiempo de
Retardo de
Cierre del
Freno
(S1-07)
ON (encendido)
Velocidad
cero al inicio
Velocidad
cero al parar
Tiempo de retardo de apertura
del contactor de salida (S1-11)
Comando Marcha
(Adelante [Arriba] / Reversa [Abajo])
H2-
= 53 (Sin velocidad cero)
H2-
= 51
(Control del contactor de salida )
H1-
= 56
(Realimentación del Contactor del Motor)
H2-
= 50 (Control del freno)
Velocidad de operación
Tiempo