Operación de rescate, Compensación de inercia (clv y clv/pm) – Yaskawa CIMR-LE Manual del usuario
Página 136
4.6 Procedimiento de configuración para las aplicaciones del elevador
136
YASKAWA SISP YAIL1E 01A YASKAWA Variador CA L1000E Manual técnico
■
Compensación de inercia (CLV y CLV/PM)
Compensación de inercia puede utilizarse para eliminar el rebasamiento de la velocidad del motor al final de la
aceleración o la disminución al final de la desaceleración causada por la inercia del sistema. Ajuste la función mediante
los siguientes pasos.
1.
Ajuste correctamente los parámetros del lazo de control de velocidad (C5-).
2.
Configure los parámetros n5-01 a 1 para habilitar la compensación de la inercia.
3.
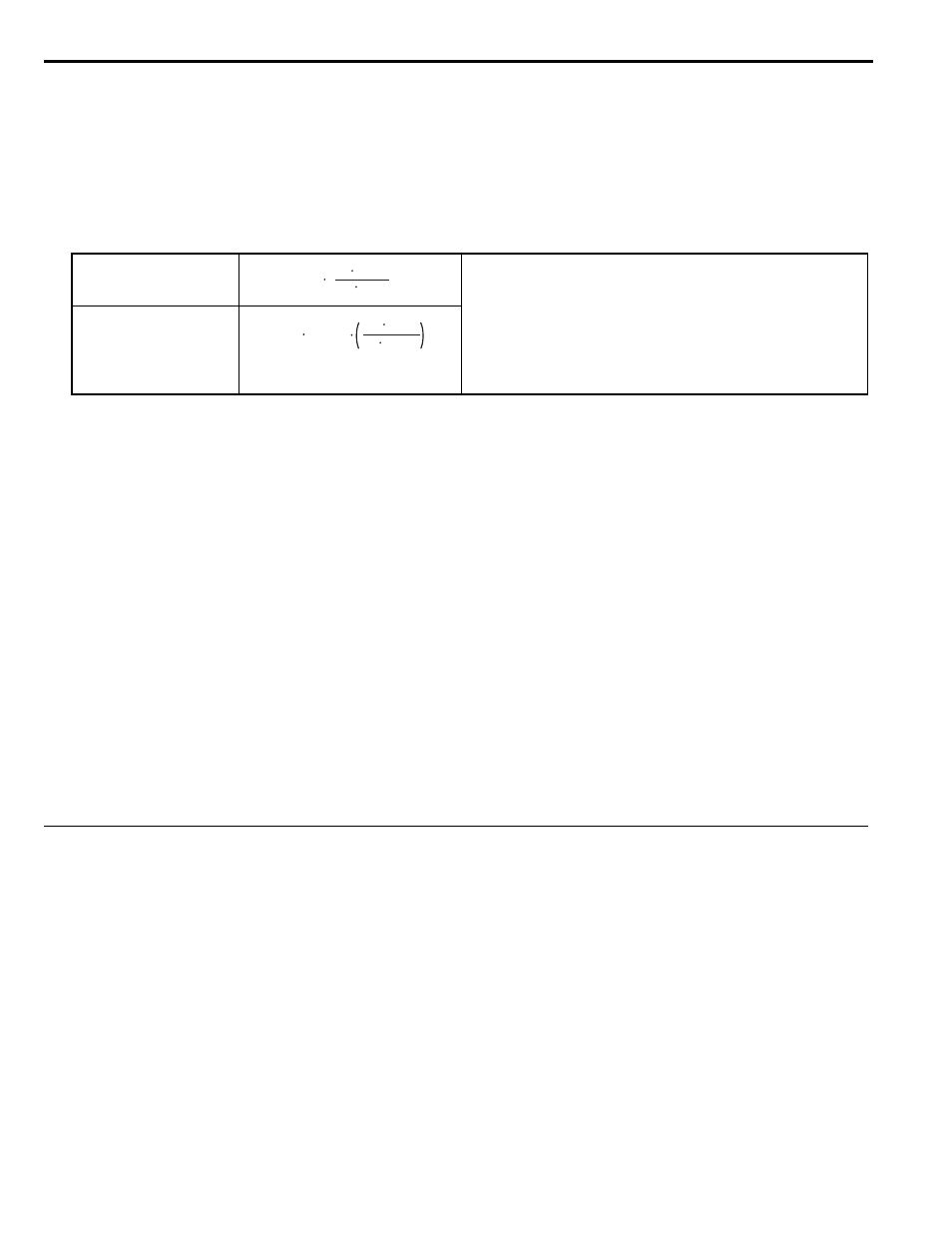
Calcule y configure n5-02 y n5-03 de la siguiente manera:
4.
Cambie la configuración de n5-03 dentro de los límites calculados en el paso 3 hasta alcanza el desempeño
deseado.
Si es posible rastree la velocidad de salida después del arranque lento (U1-16) y los valores de la velocidad del
motor (U1-05). Aumente n5-03 si la velocidad del motor no sigue la velocidad después del arranque lento.
Disminuye n5-03 si el motor sobrepasa la velocidad señalada al final de la aceleración o no alcanza la velocidad
al final de la desaceleración.
■
Ajuste el bloqueo de posición en el inicio (CLV/PM)
Configure los parámetros S3- y C5- como se describe a continuación a fin de reducir los efectos de retroceso al
inicio.
• Con el carro elevador descargado, ajuste la ganancia del lazo de velocidad (C5-19) y el tiempo integral para el bloqueo
de posición (C5-20). Aumente la ganancia y reduzca el tiempo integral para reducir el retroceso del carro. Establezca
parámetros C5-19 y
C5-20 en el sentido contrario si se produce vibración.
• Ajuste el bloqueo de posición en la ganancia de inicio 2 (S3-02). Aumente S3-02 si se presenta retroceso, disminuya
S3-02 si se presenta vibración.
• Si el elevador está equilibrado y se produce oscilación al inicio, trate de aumentar gradualmente la configuración en S3-
40 en incrementos de un solo pulso.
◆ Operación de rescate
En el caso de un apagón, la operación de rescate permite que el elevador viaje hasta el piso más cercano mediante el
cambio a una batería de respaldo o UPS (fuente de alimentación ininterrumpida) para recibir energía.
Un terminal de entrada configurado para la operación de rescate (H1- = 55) puede utilizarse para iniciar la operación
de rescate. Durante la operación de rescate, el variador utiliza la referencia de velocidad configurada en d1-25 para viajar
hasta el piso más cercano.
AVISO: Peligro del equipo. No utilice la función de la operación de rescate durante períodos prolongados. El incumplimiento podría
ocasionar alarmas de sobretemperatura en el disipador de calor del variador (oH).
AVISO: Al cambiar los parámetros mientras el variador es alimentado desde el suministro eléctrico, espere al menos 5 s después de
ingresar los parámetros antes de apagar el suministro eléctrico. Apagar inmediatamente la energía puede causar corrupción de los
ajustes de parámetros que sólo puede resolverse mediante la inicialización del variador. Esto puede causar un desempeño erróneo
del variador.
Tiempo de aceleración del motor
n5-02
<1> Introduzca 0 kg para la carga para calcular la configuración más baja, inserte la carga nominal del variador para calcular la configuración
valor máxima para n5-03. Utilice el el ajuste más bajo para ensayos iniciales.
• J
Mot
- Inercia del motor en kgm
2
• n
r_Mot
- Velocidad nominal del motor en min
-1
• T
r_Mot
- Torque nominal del motor en Nm
• J
TS
- Inercia de la polea de tracción en kgm
2
• i - Relación de engranaje (n
Carga
/n
Mot
)
• v
r_Elev
- Velocidad nominal del elevador en m/s
•
m - Masa de todas las partes móviles (carro, contrapeso, cuerdas, carga
en kg
Ganancia de compensación de
inercia
n5-03
n5-02
= J
Mot
π n
r_Mot
30 T
r_Mot
ΣJ
= J
TS
i
2
+
Σm
30 v
r_Elev
π n
r_Mot
2
n5-03
=
ΣJ / J
Mot