N: regulaciones especiales, N1: prevención de tironeos, B.11 n: regulaciones especiales – Yaskawa CIMR-AU 200V Manual del usuario
Página 665
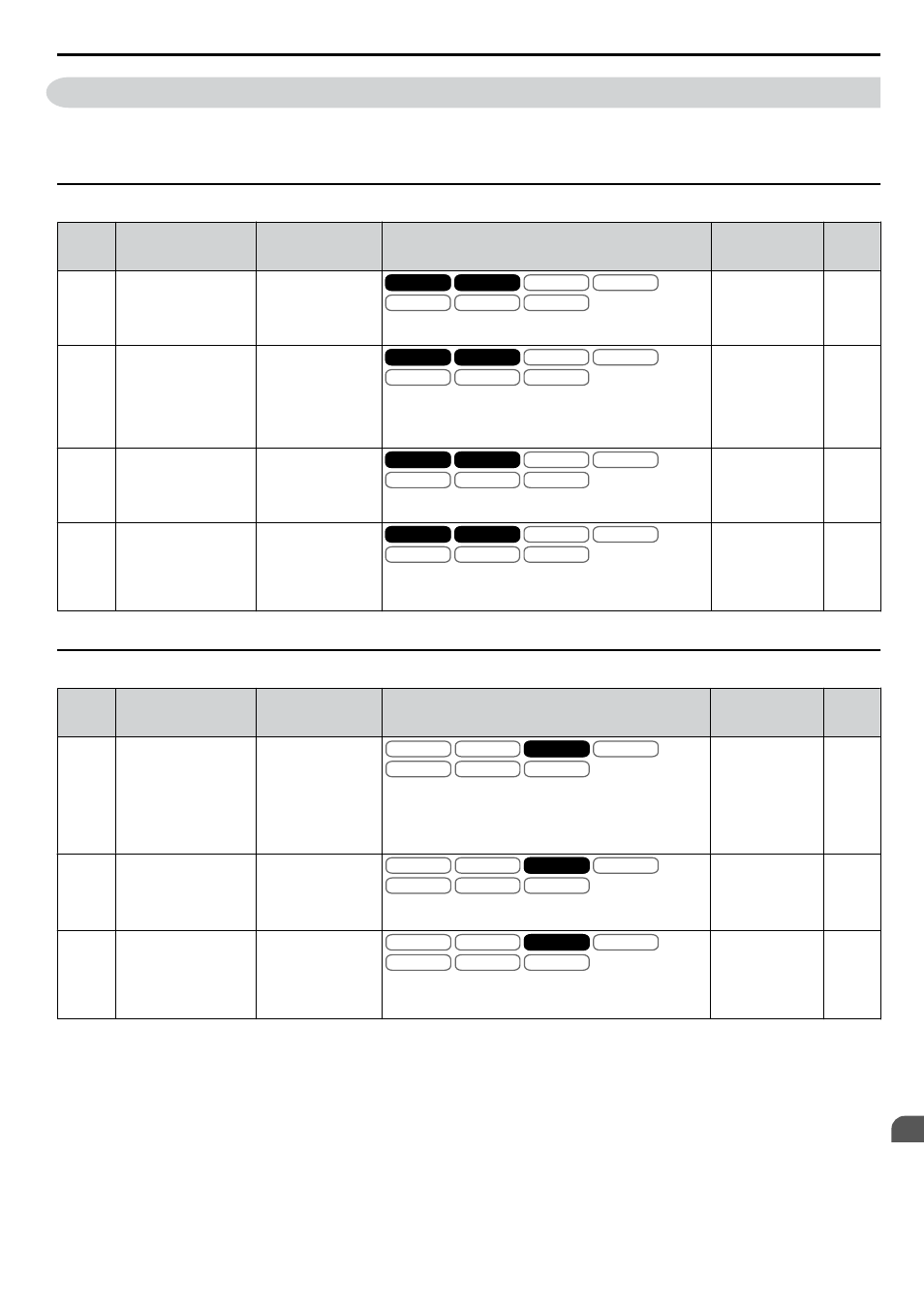
B.11 n: Regulaciones especiales
Los parámetros n regulan características de rendimiento más avanzadas, como la prevención de tironeos, la detección de
realimentación de velocidad, el frenado por deslizamiento alto y el ajuste en línea de la resistencia de línea a línea del
motor.
u
n1: Prevención de tironeos
N.º
(Dir.
Hex)
Nombre
Pantalla LCD
Descripción
Valores
Página
n1-01
(0580)
Selección de la
Prevención de
Tironeos
Hunt Prev Select
0: Disabled
1: Enabled
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
V/f
V/f w PG
0: Desactivada
1: Activada
Predeterminado: 1
Rango: 0, 1
n1-02
(0581)
Configuración de la
Ganancia de la
Prevención de
Tironeos
Hunt Prev Gain
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
V/f
V/f w PG
Si el motor vibra cuando tiene una carga liviana, aumente
la ganancia en incrementos de 0.1 hasta que la vibración se
detenga. Si el motor se bloquea, reduzca la ganancia en
incrementos de 0.1 hasta que el bloqueo desaparezca.
Predeterminado:
1.00
Mín.: 0.00
Máx.: 2.50
n1-03
(0582)
Constante de Tiempo
para la Prevención de
Tironeos
Hunt Prev Time
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
V/f
V/f w PG
Configura la constante de tiempo utilizada para la
prevención de tironeos.
Predeterminado:
<1>
Mín.: 0 ms
Máx.: 500 ms
n1-05
(0530)
Ganancia de la
Prevención de Tironeos
en Reversa
Hprev Gain @Rev
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
V/f
V/f w PG
Configura la ganancia utilizada para la prevención de
tironeos. Si está configurada en 0, para la operación en
reversa se utiliza la ganancia configurada en n1-02.
Predeterminado:
0.00
Mín.: 0.00
Máx.: 2.50
<1> La configuración predeterminada queda determinada por el parámetro o2-04, Selección del Modelo de Variador.
u
n2: Ajuste del control de detección de realimentación de velocidad (AFR)
N.º
(Dir.
Hex)
Nombre
Pantalla LCD
Descripción
Valores
Página
n2-01
(0584)
Ganancia del Control de
Detección de
Realimentación de
Velocidad (AFR)
AFR Gain
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
OLV
Configura la ganancia del control de detección de
realimentación de velocidad interno en el regulador de
frecuencia automático (AFR).
Si ocurre un tironeo, aumente el valor configurado. Si la
respuesta es baja, reduzca el valor configurado.
Predeterminado:
1.00
Mín.: 0.00
Máx.: 10.00
n2-02
(0585)
Constante de Tiempo 1
del Control de
Detección de
Realimentación de
Velocidad (AFR)
AFR Time
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
OLV
Configura la constante de tiempo utilizada para el control
de detección de realimentación de velocidad (AFR).
Predeterminado:
50 ms
Mín.: 0
Máx.: 2000
n2-03
(0586)
Constante de Tiempo 2
del Control de
Detección de
Realimentación de
Velocidad (AFR)
AFR Time 2
V/f
OLV/PM
V/f w PG
AOLV/PM
OLV
CLV/PM
CLV
OLV
Configura la constante de tiempo del AFR que se utilizará
durante la búsqueda de velocidad y durante la
regeneración.
Predeterminado:
750 ms
Mín.: 0
Máx.: 2000
B.11 n: Regulaciones especiales
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico
665
B
Lista de parámetros