Tabla 5.8 – Yaskawa CIMR-AU 200V Manual del usuario
Página 248
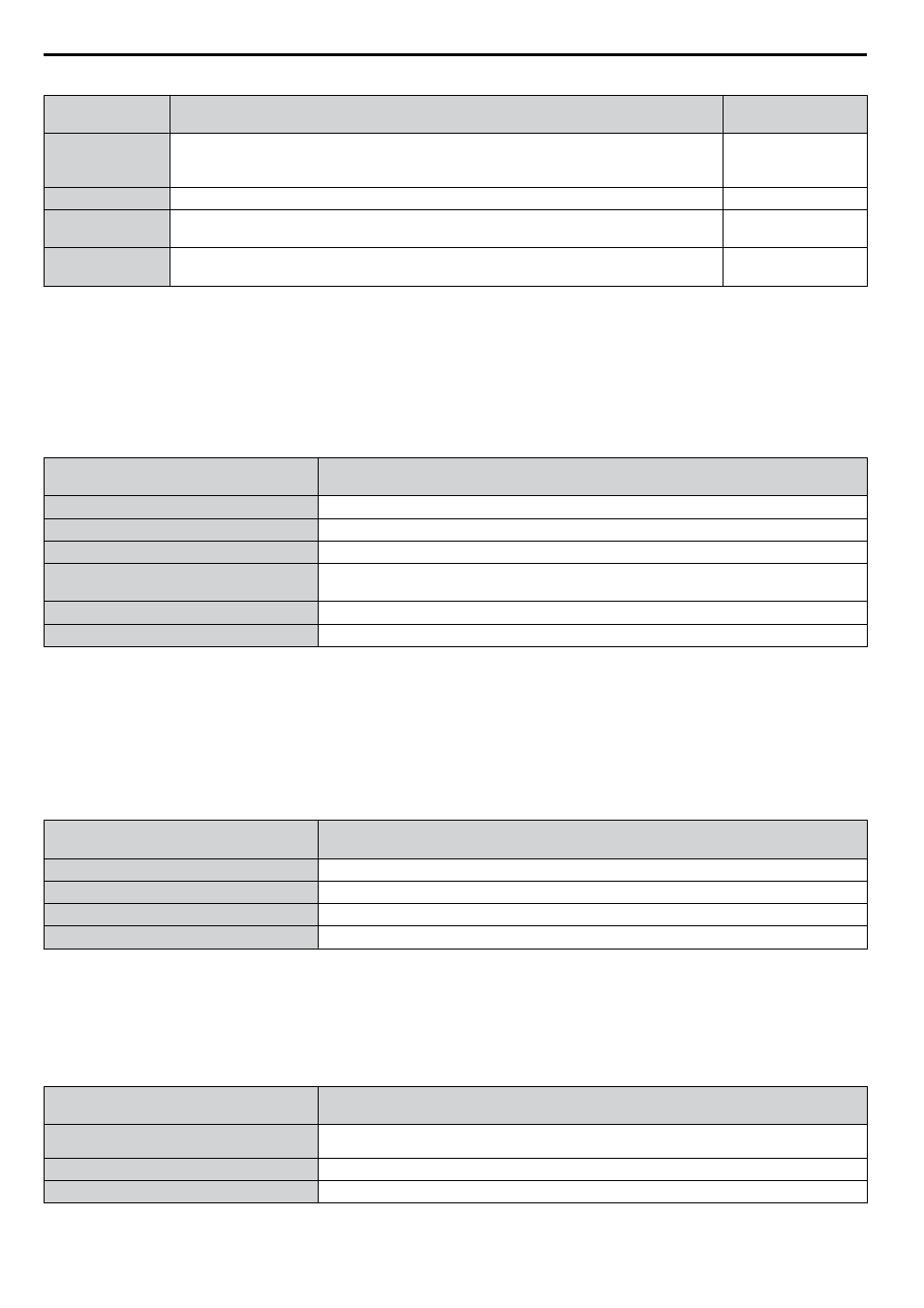
Tabla 5.8 Uso del control PID
Aplicación
Descripción
Sensores
utilizados
Control de
velocidad
La velocidad de la maquinaria se realimentada y regula para alcanzar el valor objetivo.
El control sincrónico se realiza utilizando los datos de velocidad de otras máquinas como
valor objetivo
Tacómetro
Presión
Mantiene la presión constante usando la realimentación de presión.
Sensor de presión
Control de fluido Mantiene el flujo en un nivel constante realimentando los datos del flujo.
Sensor de la velocidad
del flujo
Control de
temperatura
Mantiene la temperatura constante controlando un ventilador con termostato.
Termopar, termistor
n
Métodos de entrada del punto de ajuste de PID
La entrada del punto de ajuste de PID depende de la configuración de la función de PID en el parámetro b5-01.
Si el parámetro b5-01 se coloca en 1 ó 2, la fuente de referencia de frecuencia en b1-01 (o en b1-15) o una de las entradas
se convierte en el punto de ajuste de PID.
Si b5-01 está configurado en 3 ó 4, entonces el punto de ajuste de PID puede ingresarse desde una de las fuentes enumeradas
en la
.
Tabla 5.9 Fuentes del punto de ajuste de PID
Fuente externa del punto de ajuste
de PID
Configuraciones
Entrada analógica A1
Configure H3-02 = C
Entrada analógica A2
Configure H3-10 = C
Entrada analógica A3
Configure H3-06 = C
Registro 0006 H de MEMOBUS/Modbus Configure el bit 1 del registro 000F H en 1 e ingrese el punto de ajuste del registro 0006
H
RP de la entrada de pulsos
Configure H6-01 = 2
Parámetro b5-19
Configure el parámetro b5-18 = 1 e ingrese el punto de ajuste de PID en b5-19
Nota:
La asignación duplicada de la entrada del punto de ajuste de PID genera una alarma oPE.
n
Métodos de entrada de la realimentación de PID
Ingrese una señal de realimentación para el control PID normal o ingrese dos señales de realimentación para controlar un
valor de proceso diferencial.
Realimentación PID normal
Ingrese la señal de realimentación PID desde una de las fuentes enumeradas en la
Tabla 5.10 Fuentes de realimentación PID
Fuente externa de realimentación
PID
Configuraciones
Entrada analógica A1
Configure H3-02 = B
Entrada analógica A2
Configure H3-10 = B
Entrada analógica A3
Configure H3-06 = B
RP de la entrada de pulsos
Configure H6-01 = 1
Nota:
Una asignación duplicada de la entrada de realimentación de PID genera una alarma oPE.
Realimentación diferencial
La segunda señal de realimentación PID para la realimentación diferencial puede provenir de las fuentes enumeradas en
la
realimentación diferencial.
Tabla 5.11 Fuentes de realimentación diferencial de PID
Fuente externa de realimentación
diferencial de PID
Configuraciones
Entrada analógica A1
Configure H3-02 = 16
Entrada analógica A2
Configure H3-10 = 16
Entrada analógica A3
Configure H3-06 = 16
Nota:
La asignación duplicada de la entrada de realimentación diferencial de PID genera una alarma oPE.
5.2 b: Aplicación
248
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico