Yaskawa CIMR-AU 200V Manual del usuario
Página 254
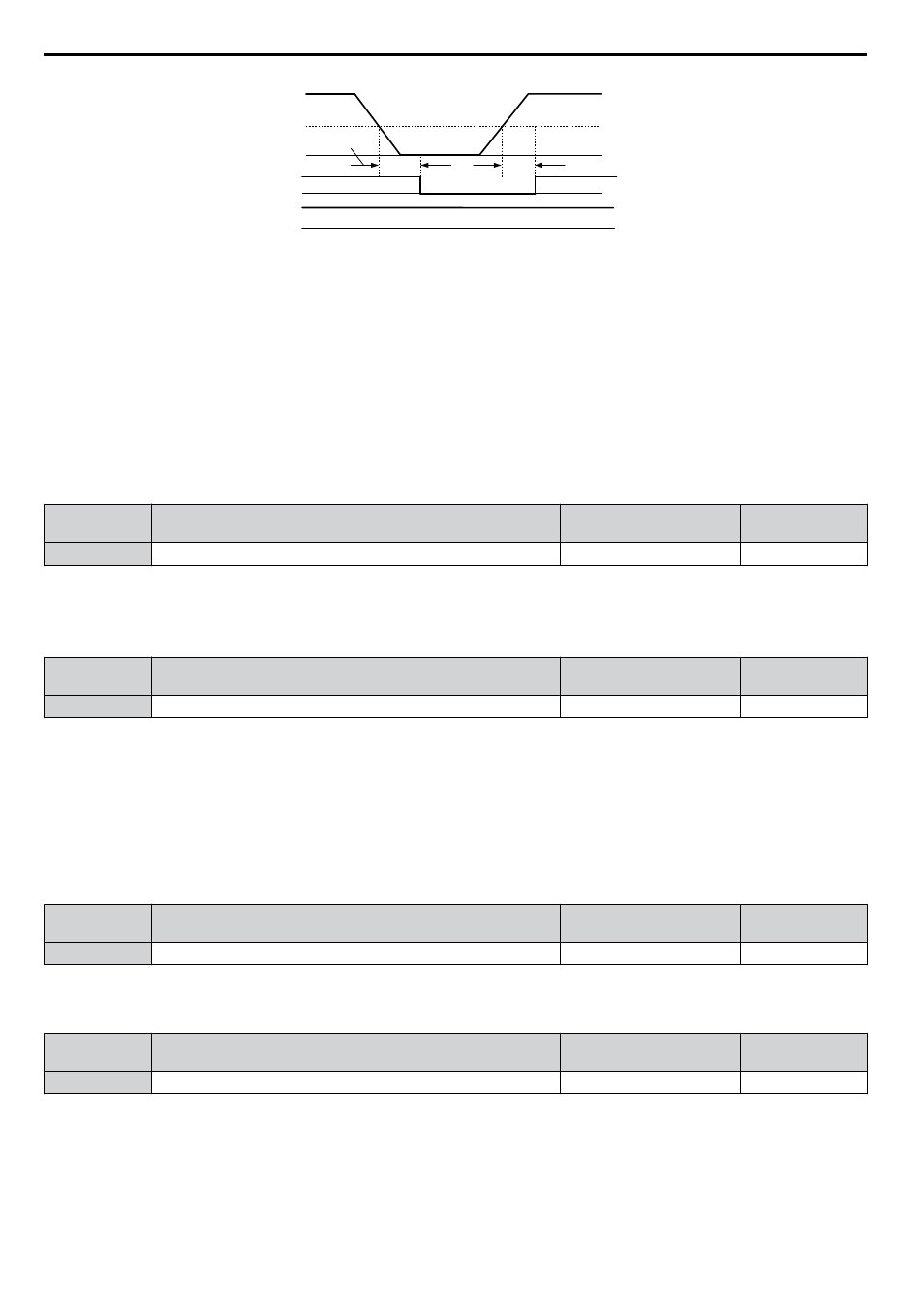
Salida de PID
Nivel de espera
del PID
( b5-15)
Tiempo de retardo de
la espera
Tiempo de retardo de
la espera
Comando Marcha activada
Sigue emitiendo “Durante la marcha”
Comando
Marcha interno
Comando
Marcha externo
Durante la marcha
Paro
b5-16
b5-16
Marcha
Figura 5.27 Funcionamiento de la espera del PID
Notas sobre el uso de la función de espera del PID
• La función de espera del PID está activa cuando el control PID está desactivado.
• La función de espera del PID detiene el motor de acuerdo con el método de detención configurado en b1-03.
Los parámetros necesarios para controlar la función de espera del PID se explican a continuación.
n
b5-15: Nivel de Inicio de la Función de Espera del PID
Define el nivel que activa la espera del PID.
El variador entra en modo de espera si la salida del PID o la referencia de frecuencia son menores que b5-15 o mayores
que el período de tiempo configurado en b5-16. El variador reanuda el funcionamiento cuando la salida del PID o la
referencia de frecuencia superan el valor de b5-15 durante un período mayor que el tiempo configurado en b5-16.
N.º
Nombre
Rango de
configuración
Predeterminado
b5-15
Nivel de Inicio de la Función de Espera del PID
0.0 a 400.0 Hz
<1>
0.0 Hz
<1> En los modos de control AOLV/PM y CLV/PM, las unidades y el rango de de configuración se expresan como porcentaje (de 0.0 a 100.0%).
n
b5-16: Tiempo de Retardo de la Espera del PID
Configura el tiempo de retardo para activar o desactivar la función de espera del PID.
N.º
Nombre
Rango de
configuración
Predeterminado
b5-16
Tiempo de Retardo de la Espera del PID
0.0 a 25.5 s
0.0 s
n
b5-17: Tiempo de Aceleración/Desaceleración de PID
El tiempo de aceleración/desaceleración del PID se aplica al valor del punto de ajuste del PID.
Cuando el punto de ajuste cambia con rapidez, los tiempos de aceleración normales de C1-oo reducen la capacidad de
respuesta del sistema a medida que se aplican después de la salida del PID. El tiempo de aceleración/desaceleración del
PID ayuda a evitar el tironeo, los sobreimpulsos y los subimpulsos que pueden provocarse a causa de la menor capacidad
de respuesta.
El tiempo de aceleración/desaceleración del PID puede cancelarse mediante una entrada digital programada para “cancelar
SFS del PID” (H1-oo = 34).
N.º
Nombre
Rango de
configuración
Predeterminado
b5-17
Tiempo de Aceleración/Desaceleración de PID
0.0 a 6000.0 s
0.0 s
n
b5-18: Selección del Punto de Ajuste de PID
Activa o desactiva el parámetro b5-19 del punto de ajuste del PID.
N.º
Nombre del parámetro
Rango de
configuración
Predeterminado
b5-18
Selección del Punto de Ajuste de PID
0, 1
0
Configuración 0: Desactivada
El parámetro b5-19 no se utiliza como punto de ajuste del PID.
Configuración 1: Activada
El parámetro b5-19 se utiliza como punto de ajuste del PID.
n
b5-19: Valor del Punto de Ajuste de PID
Se utiliza como punto de ajuste del PID si el parámetro b5-18 = 1.
5.2 b: Aplicación
254
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico