Figura 5.64 – Yaskawa CIMR-AU 200V Manual del usuario
Página 330
M
M
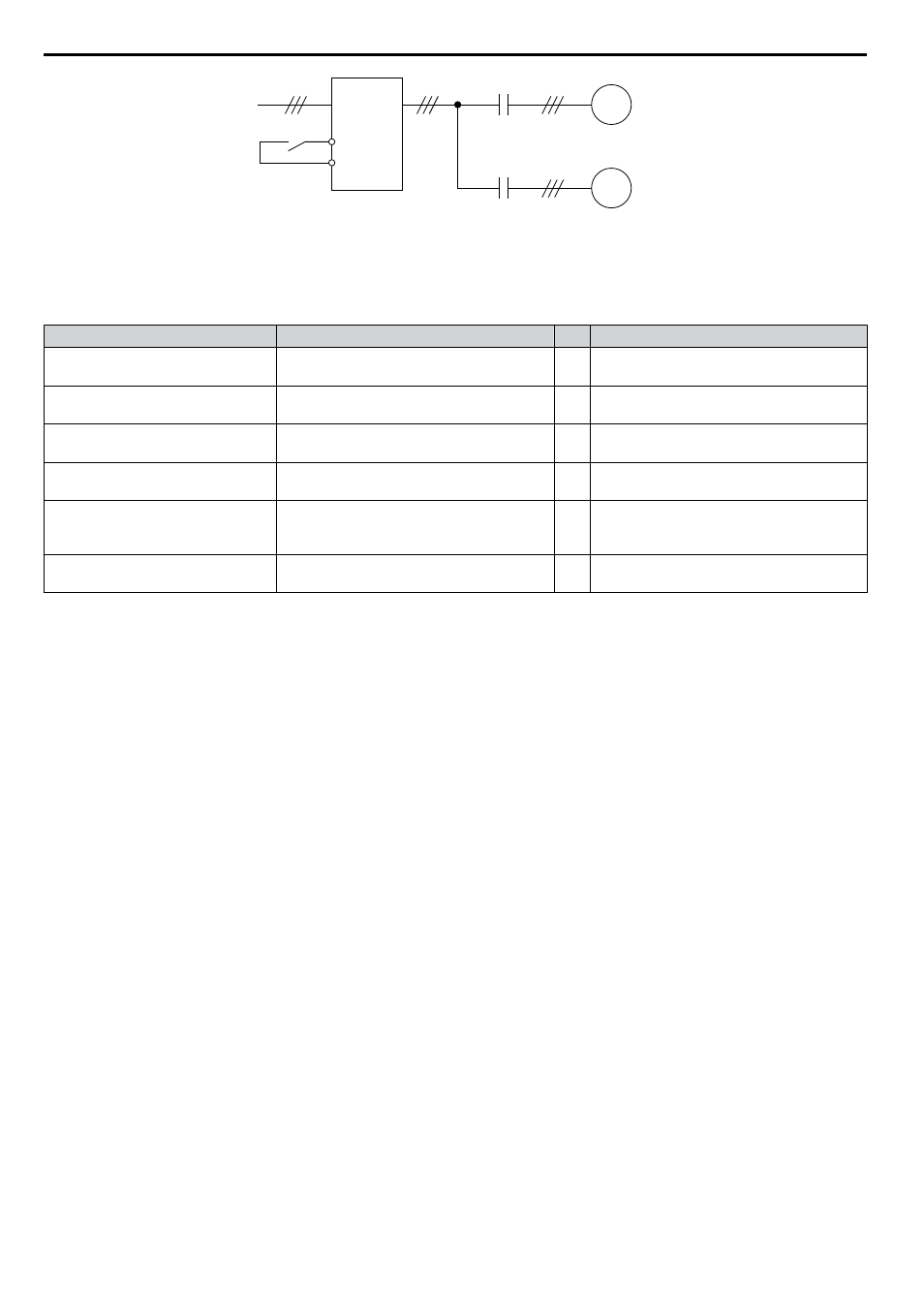
Variador
Motor 1
Motor 2
Entrada del
interruptor del motor
Figura 5.64 Selección del motor
Al alternar entre el motor 1 y el motor 2, los parámetros utilizados para controlarlos también cambian. A continuación, en
la
se enumeran los parámetros que corresponden a cada motor:
Tabla 5.38 Parámetros para cambiar entre dos motores
N.º
Configuración 16 abierta (motor 1)
⇒
Configuración 16 cerrada (motor 2)
C1-oo: Tiempo de Aceleración/
Desaceleración
C1-01 a C1-04
⇒ C1-05 a C1-08
C3-oo : Compensación del
Deslizamiento del Motor
C3-01 a C3-04
⇒ C3-21 a C3-24
C4-oo: Compensación del Torque
del Motor
C4-01
⇒ C4-07
C5-oo: Control de Velocidad
(ASR)
C5-01 a C5-08, C5-12, C5-17, C5-18
⇒ C5-21 a C5-28, C5-32, C5-37, C5-38
E1-oo, E3-oo: Patrón de V/f
E2-oo, E4-oo: Parámetros del
Motor
E1-oo, E2-oo
⇒ E3-oo a E4-oo
F1-oo (PG Constante)
F1-01 a F1-21
⇒ F1-02 a F1-04, F1-08 a F1-11, F1-14,
F1-31 a F1-37
Nota:
1. Cuando se utilicen dos motores, en el motor 1 y el motor 2 se aplica la selección de protección contra sobrecargas del motor (oL1)
configurada en L1-01.
2. Si intenta cambiar entre el motor 1 y el motor 2 durante la marcha, se acciona la alarma rUn.
3. Existe una demora de 500 ms al cambiar entre motores equipados con un encoder PG para realimentación.
4. La función de selección del motor 2 no puede utilizarse con motores PM.
Si se programa una salida digital para la “Selección del motor 2” (H2-01, H2-02 o H2-03 = 1C), la salida se cierra cuando
se selecciona el motor 2.
Configuración 18: Entrada de la función de temporizador
Esta función configura un terminal de entrada digital como la entrada de la función de temporizador. Utilice esta
combinación de configuración con la salida de la función del temporizador (H2-oo = 12).
para conocer los detalles.
Configuración 19: Desactivar PID
Cierre una entrada digital para desactivar indefinidamente la función PID. Cuando se libera la entrada, el variador reanuda
Refiérase a Diagrama de bloques de PID PAG. 249
Configuración 1A: Selección del tiempo de aceleración/desaceleración 2
Selecciona los tiempos de aceleración/desaceleración 1 a 4 junto con el comando de Selección 1 del tiempo de aceleración/
Refiérase a C1-01 a C1-08: Tiempos de aceleración y desaceleración 1 a 4 PAG. 262
detalles.
Configuración 1B: Bloqueo del programa
Los valores de los parámetros no se pueden modificar cuando se programa una entrada para el bloqueo del programa y la
entrada está abierta. Sin embargo, aún se pueden visualizar y monitorear las configuraciones de los parámetros.
Configuración 1E: Retención de muestra de referencia
Esta función permite al usuario probar una señal de referencia de frecuencia analógica que está entrando al terminal A1,
A2 o A3, y retener la referencia de frecuencia en el nivel de muestra. Cuando la función Retener/Muestra de referencia de
frecuencia analógica se mantiene durante al menos 100 ms, el variador lee la entrada analógica y cambia la referencia de
frecuencia a la nueva velocidad de muestra, tal como se ilustra en
.
Cuando se desactiva la alimentación y se borra la referencia de frecuencia analógica de muestra, la referencia de muestra
se restablece en 0.
5.7 H: Funciones de terminales
330
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico