Yaskawa CIMR-AU 200V Manual del usuario
Página 351
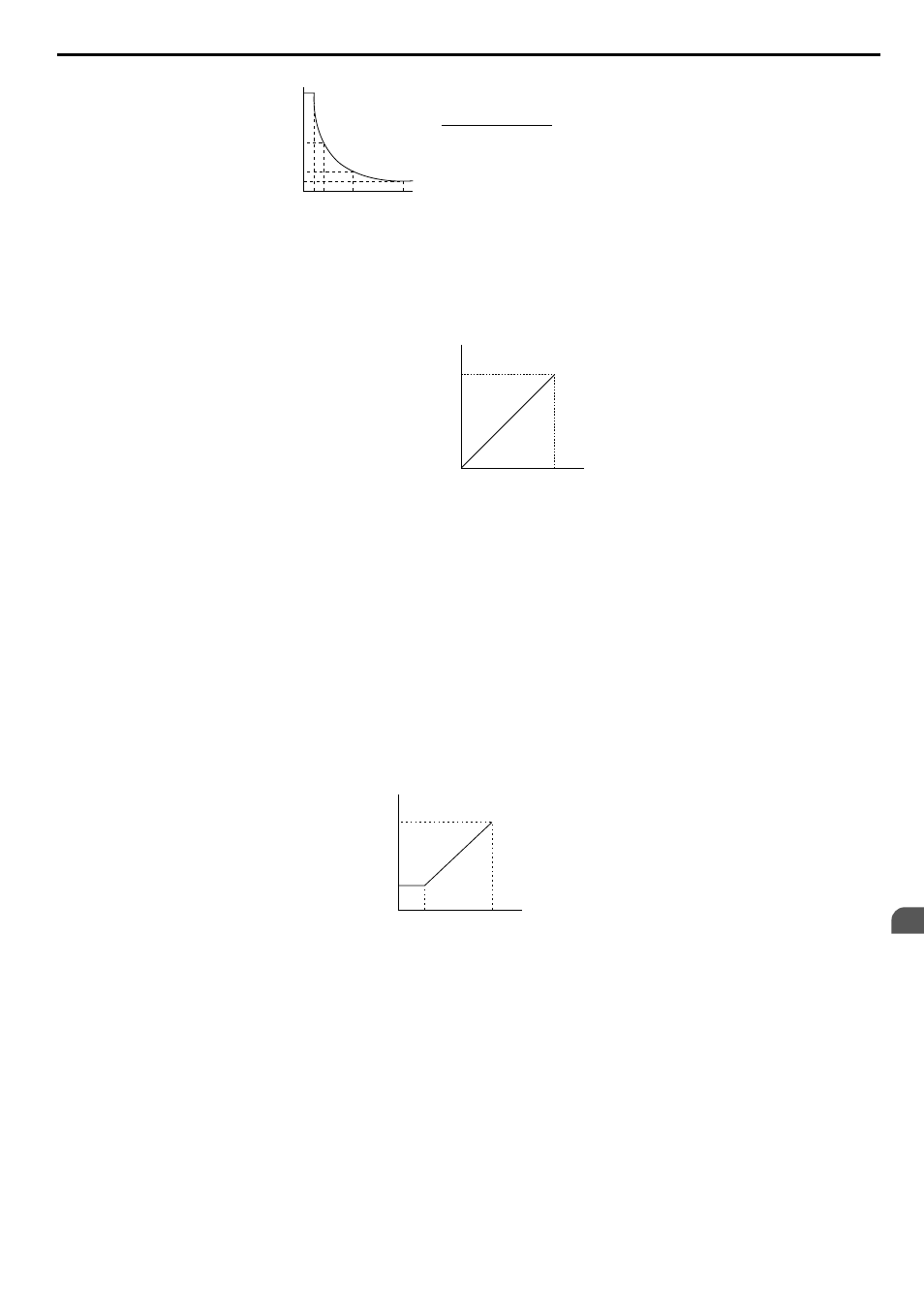
100%
50%
0
5 V
10 V
1 V 2 V
20%
10%
Ganancia de aceleración/desaceleración de 1 a 10 V
(10 V)
Tensión de entrada (V)
× 10 (%)
=
Figura 5.83 Ganancia de tiempo de aceleración/desaceleración con terminal de entrada analógica
Configuración 6: Corriente de frenado por inyección de CC
El nivel de corriente utilizado para el frenado por inyección de CC se configura como porcentaje de la corriente nominal
del variador.
Corriente nominal
del variador
0
(4)
100%
10 V
(20 mA)
Nivel de la corriente de frenado por inyección de CC
Figura 5.84 Corriente de frenado por inyección de CC usando un terminal de entrada analógica
Configuración 7: Nivel de detección de torque
Si utiliza esta configuración, puede configurarse el nivel de detección de exceso de torque/bajo torque para la detección
de torque 1 (L6-01) mediante una entrada analógica. La entrada analógica reemplaza el nivel configurado en L6-02. Una
entrada analógica del 100% (10 V o 20 mA) configura un nivel de detección de torque igual al 100% de la corriente nominal
del variador/torque nominal del motor. Regule la ganancia de entrada analógica si se requiere una configuración mayor
Refiérase a L6: Detección de torque PAG. 382
para obtener información detallada sobre la
detección de torque.
Configuración 8: Nivel de prevención de bloqueo
Permite una señal de entrada analógica para regular el nivel de prevención de bloqueo.
características de la configuración. El variador utiliza el valor inferior del nivel de prevención de bloqueo configurado en
L3-06 o el nivel proveniente del terminal de entrada analógica seleccionado.
Nivel de prevención de bloqueo durante la marcha
30%
100%
Nivel de la
entrada analógica
30%
100%
0
Figura 5.85 Prevención de bloqueo durante la marcha usando un terminal de entrada analógica
Configuración 9: Nivel de límite inferior de la frecuencia de salida
El usuario puede regular el límite inferior de la frecuencia de salida usando una señal de entrada analógica.
Configuración B: Realimentación de PID
Proporciona un valor de realimentación de PID. Esta configuración requiere que esté activado el funcionamiento de PID
Refiérase a Métodos de entrada de la realimentación de PID PAG. 248
Configuración C: Punto de ajuste de PID
Suministra el valor del punto de ajuste de PID y hace que la referencia de frecuencia seleccionada en el parámetro b1-01
deje de ser el punto de ajuste de PID. El funcionamiento de PID debe estar activado en b5-01 para poder usar esta
configuración.
Refiérase a Métodos de entrada del punto de ajuste de PID PAG. 248
.
Configuración D: Polarización de frecuencia
El valor de entrada de una entrada analógica configurada para esta función se añade a la referencia de frecuencia. Esta
función se puede utilizar con cualquier fuente externa de referencia de frecuencia.
5.7 H: Funciones de terminales
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico
351
5
Detalles de los parámetros