Diagrama de bloques de pid, 2 b: aplicación, Figura 5.25 diagrama de bloques de pid – Yaskawa CIMR-AU 200V Manual del usuario
Página 249: Detalles de los parámetros
n
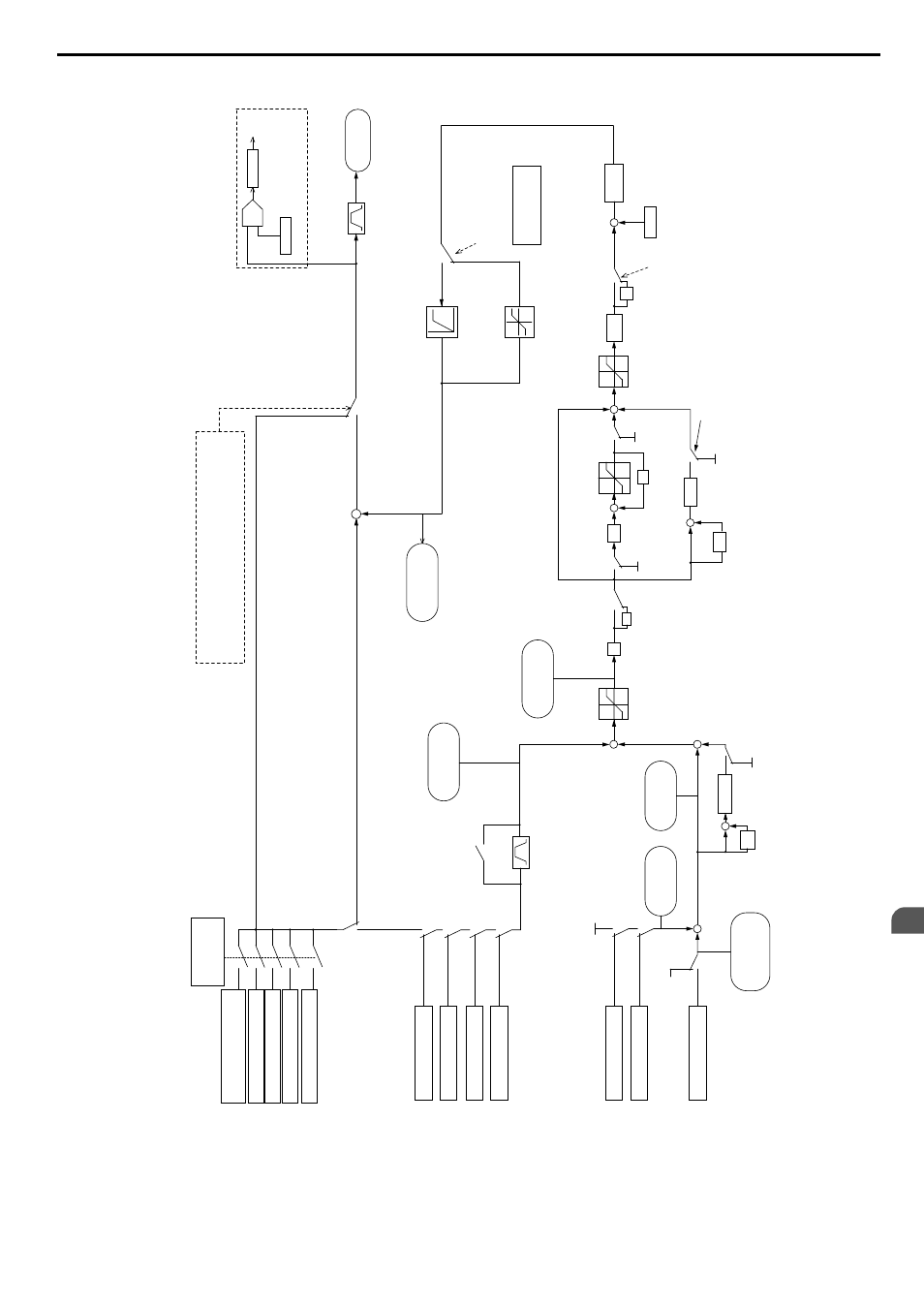
Diagrama de bloques de PID
-
+
+
+
+
+
+
+
+
+
1
-1
+
+
+
-
Z
-1
+
-
+
+
+
+
+
Z
-1
-1
Z
-1
Referencia de Frecuencia de 1 a 16
Referencia de
Frecuencia
b1-01/15
no 1
Tarjeta opcional
Comunicación serial
Entrada analógica
A1/A2/A3
Entrada de pulsos
Frecuencia
de Salida
P
1/s
b5-08
1
2
3
Punto de
ajuste de PID
(U5-04)
Ganancia
Proporcional
b5-02
T
iempo I
b5-03
Límite I
b5-04
Salida de PID
Límite superior/
inferior
b5-06 / b5-34
T
iempo de demora de PID
Desactiva PID cuando:
- b5-01=0
- Se ingresa un comando de marcha lenta
- Desactivación de PID mediante entrada digital activada
0
Sostenimiento
integral
H1-
oo
=31
Restablecimiento integral
H1-
oo
=30
Característica de
la salida de PID
b5-09
Activar/desactivar la operación
en reversa cuando la salida de
PID es negativa
b5-18=1
Referencia de Frecuencia
Objetivo de PID
Realimentación de PID
0
1
0
1
0
1
0
Arranque Lento
de PID b5-17
DI de cancelación
de SFS de PID H1-
oo
=34
Entrada de PID
(U5-02)
Realimentación
de PID
(U5-01)
b5-07
b5-10
Ganancia de la
Salida de PID
Regulación de la
Compensación de PID
b5-15
Nivel de Configuración de Espera
Encendido/
apagado
de RUN
b5-16
T
iempo de Retardo
de la Espera de PID
Función de Espera
SFS
C1-
oo
4
d1-01 a d1-16
H6-01=2
H3-02/10=C
H6-01=1
b5-05
1 ó 3
2 ó 4
b5-01
T
iempo
Derivado
no B
no C
no 2
b5-05
b5-01
2 ó 4
1 ó 3
no 1
H3-02/10=B
Entrada analógica
A1/A2/A3
Entrada de pulsos
Reg. 0006h de
MEMOBUS
b5-19
0
1
Entrada analógica
A1/A2/A3
Entrada de pulsos
0
Límite de
Entrada de PID
b5-35
Desactivada
Activada
Entrada analógica
A1/A2/A3
0
no 16
H3-02/10
= 16
Realimentación
Diferencial de PID
(U5-05)
Realimentación de PID regulada
(U5-06)
Salida de PID
(U5-03)
T
iempo
Derivado
Límite superior
Fmax x109%
Límite inferior
Fmax x109%
Límite inferior 0
b5-
11
1
0
Límite superior
Fmax x109%
Siempre es 1 cuando b5-01 = 3/4
Encendido
Apagado
Característica de
la entrada de PID
H1-
oo
=35
Modo de PID
b5-01 = 1/2
b5-01 = 3/4
Reg. 0Fh, bit 1
Figura 5.25 Diagrama de bloques de PID
5.2 b: Aplicación
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico
249
5
Detalles de los parámetros