B5: control pid, Control p, Control i – Yaskawa CIMR-AU 200V Manual del usuario
Página 247: Control d, Funcionamiento pid, Uso del control pid
ON (encendido)
ON (encendido)
ON (encendido)
ON
(encendido)
Datos internos de
H2-01
Salidas digitales de
múltiple función de
H2-01
b4-03
b4-04
b4-03
On (cerrado)
Off (abierto)
On (cerrado)
Off (abierto)
b4-04
Lapso de tiempo en que la salida digital
de múltiple función está cerrada ≥ 100 ms
Lapso de tiempo en que la
salida digital de múltiple función
está cerrada < 100 ms
Lapso de tiempo en que la salida digital de
múltiple función está cerrada = 100 ms
Nota:
La salida digital de múltiple función se cierra durante al menos 100 ms, incluso si el tiempo de retardo de apagado y el tiempo de retardo
de encendido de la salida digital de múltiple función son menores que 100 ms.
u
b5: Control PID
El variador posee un controlador integrado de acción proporcional, integral y derivada (PID) que utiliza la diferencia entre
el valor objetivo y el valor de realimentación para regular la frecuencia de salida del variador a fin de minimizar la
desviación y proporcionar un control preciso de lazo cerrado de las variables del sistema, como la presión o la temperatura.
n
Control P
El resultado del control P es el producto de la desviación y la ganancia P, de manera tal que acompañe la desviación de
manera directa y lineal. Con el control P, solo queda una compensación entre el objetivo y la realimentación.
n
Control I
El resultado del control I es la integral de la desviación. Minimiza la desviación entre el valor objetivo y el valor de
realimentación que queda, por lo general, cuando se utiliza el control P puro. La constante de tiempo integral (tiempo I)
determina la rapidez con la que se elimina la compensación.
n
Control D
El control D predice la señal de desvío multiplicando su derivada (pendiente de desvío) por una constante de tiempo, y
luego suma este valor a la entrada PID. De esta manera, la parte D de un controlador PID proporciona una acción de frenado
a la respuesta del controlador y puede reducir la tendencia a oscilar y generar sobreimpulsos.
El control D tiende a amplificar el ruido en la señal de desvío, lo que puede provocar inestabilidad de control. Utilice el
control D solo cuando sea absolutamente necesario.
n
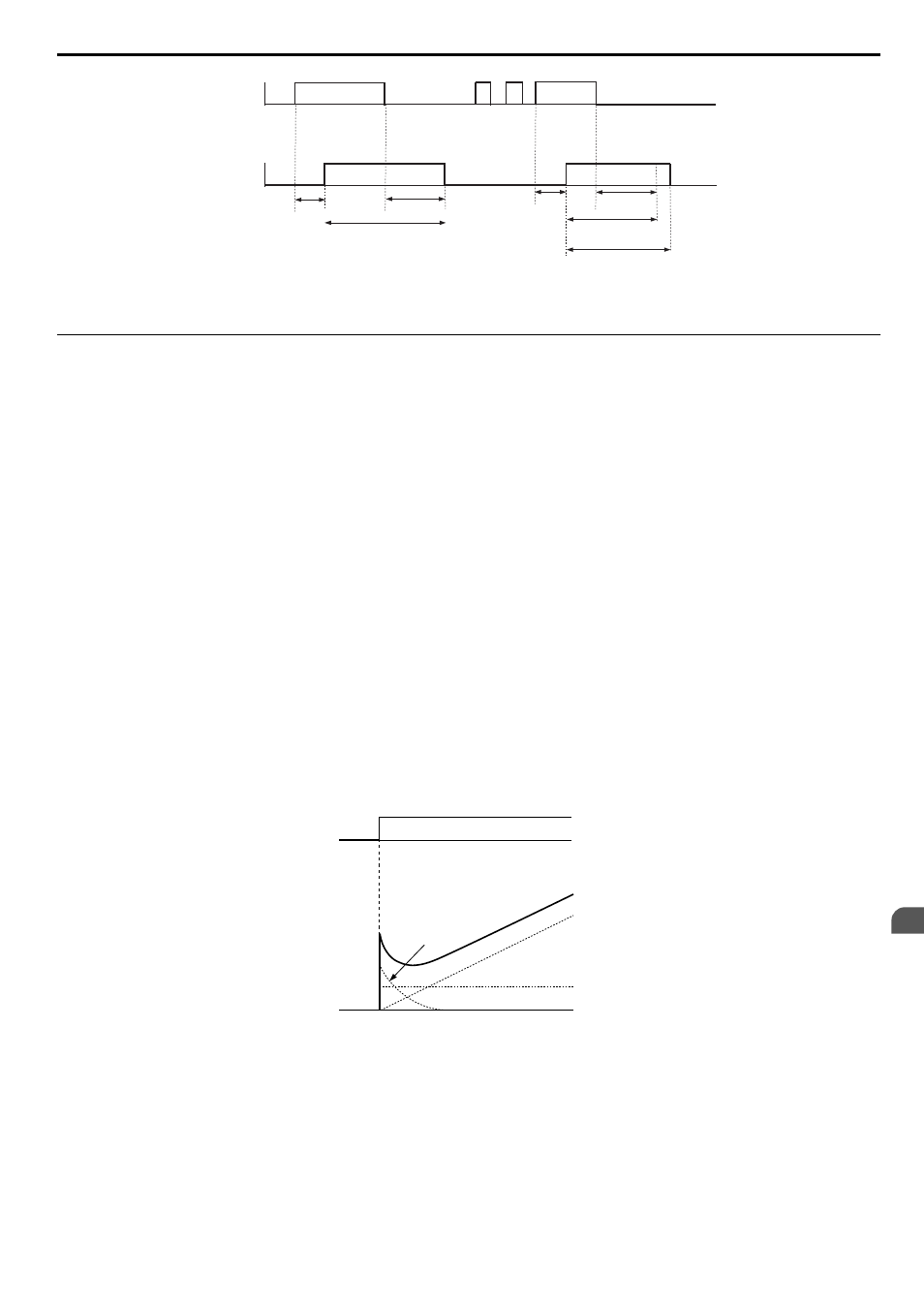
Funcionamiento PID
Para demostrar mejor la funcionalidad PID, la figura
ilustra cómo cambia la salida PID cuando la entrada
PID (desviación) salta de 0 a un nivel constante.
Entrada
de PID
Control I
Salida
de PID
Control D
Tiempo
Salida de PID
Tiempo
Control P
Figura 5.24 Funcionamiento PID
n
Uso del control PID
Las aplicaciones del control PID se enumeran en la
5.2 b: Aplicación
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico
247
5
Detalles de los parámetros