Yaskawa CIMR-AU 200V Manual del usuario
Página 290
Cuando se utiliza la comunicación mediante MEMOBUS/Modbus o una tarjeta opcional de comunicación, solo pueden
configurarse valores de entrada positivos.
Como es independiente de su fuente de entrada, la polaridad de la señal de referencia de torque puede invertirse mediante
una entrada digital programada para H1-oo = 78. Utilice esta función para ingresar valores de referencia de torque
negativos al utilizar MEMOBUS/Modbus o una tarjeta opcional de comunicación.
n
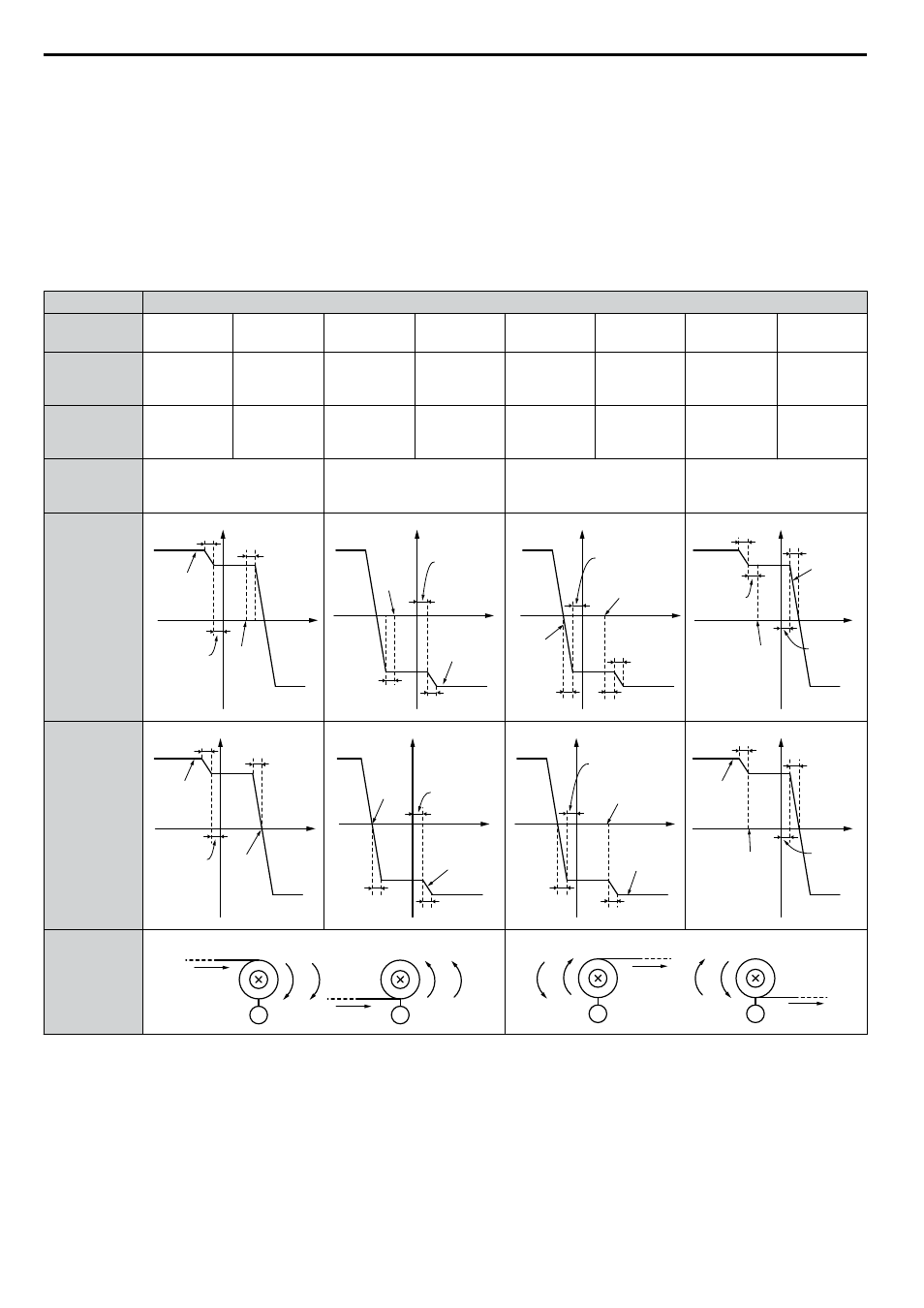
Restricción de velocidad y Polarización del Límite de Velocidad
La configuración del límite de velocidad se lee desde la entrada seleccionada en el parámetro d5-03. Se puede agregar una
polarización a este límite de velocidad utilizando el parámetro d5-05 mientras el parámetro d5-08 determina cómo se aplica
la polarización del límite de velocidad.
explica la relación entre estas configuraciones.
Tabla 5.21 Selección del límite de velocidad, la polarización de velocidad y la prioridad del límite de velocidad
Condiciones de funcionamiento
Comando de
Marcha
Adelante
Reversa
Adelante
Reversa
Adelante
Reversa
Adelante
Reversa
Dirección de
referencia de
torque
Positiva
(Adelante)
Positiva en
reversa
(Adelante)
Negativa
(Reversa)
Negativa
(Reversa)
Negativa
(Reversa)
Negativa
(Reversa)
Positiva
(Adelante)
Positiva
(Adelante)
Dirección del
límite de
velocidad
Positiva
(Adelante)
Negativa
(Reversa)
Negativa
(Reversa)
Positiva
(Adelante)
Positiva
(Adelante)
Negativa
(Reversa)
Negativa
(Reversa)
Positiva
(Adelante)
Dirección del
funcionamien
to normal
Adelante
Reversa
Adelante
Reversa
Polarización
del límite de
velocidad
bidireccional
(d5-08 = 0)
<1>
Velocidad
Torque
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Límite
de
velocidad
Δn
Polarización
del límite
de velocidad d5-05
Polarización del límite
de velocidad d5-05
Velocidad
Torque
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Límite
de
velocidad
Δn
Polarización
del límite
de velocidad
d5-05
Polarización
del límite
de velocidad
d5-05
Dn
Velocidad
Torque
d5-05
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Límite de velocidad
Δn
Polarización del límite
de velocidad d5-05
Velocidad
Torque
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Límite
de velocidad
Polarización
del límite de
velocidad
d5-05
Δn
Δn
Polarización
del límite
de velocidad
d5-05
Polarización
del límite de
velocidad
unidirecciona
l
(d5-08 = 1)
<1>
Velocidad
Torque
Δn
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Polarización
del límite
de velocidad
d5-05
Límite
de
velocidad
Δn
Velocidad
Torque
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Polarización
del límite
de velocidad
d5-05
Límite
de velocidad
Δn
Δn
Δn
Velocidad
Torque
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Polarización
del límite
de velocidad
d5-05
Límite de velocidad
Δn
Velocidad
Torque
Límite
de torque
Referencia
de torque
interna
0
Límite
de torque
Límite
de velocidad
Polarización
del límite de
velocidad
d5-05
Δn
Δn
Ejemplo de la
aplicación
Bobinador
Velocidad
Dirección
de la línea
M
Torque
M
Dirección de la línea
Velocidad Torque
Desbobinador
Torque
Dirección
de la línea
M
Velocidad
M
Dirección
de la línea
Torque Velocidad
<1> El valor de delta n en los dibujos depende de la configuración del ASR en los parámetros C5-oo.
n
Indicación de funcionamiento al límite de velocidad
Programe una salida digital para que se cierre cuando el variador funciona al límite de velocidad o por encima de este (H2-
oo = 32). Utilice esta salida para notificar las condiciones de funcionamiento anormales a un dispositivo de control,
como un PLC.
5.4 d: Configuración de referencia
290
YASKAWA ELECTRIC SISP C710616 41E Variador de CA YASKAWA A1000 Manual Técnico