Basler Electric DGC-2020 Manual del usuario
Página 380
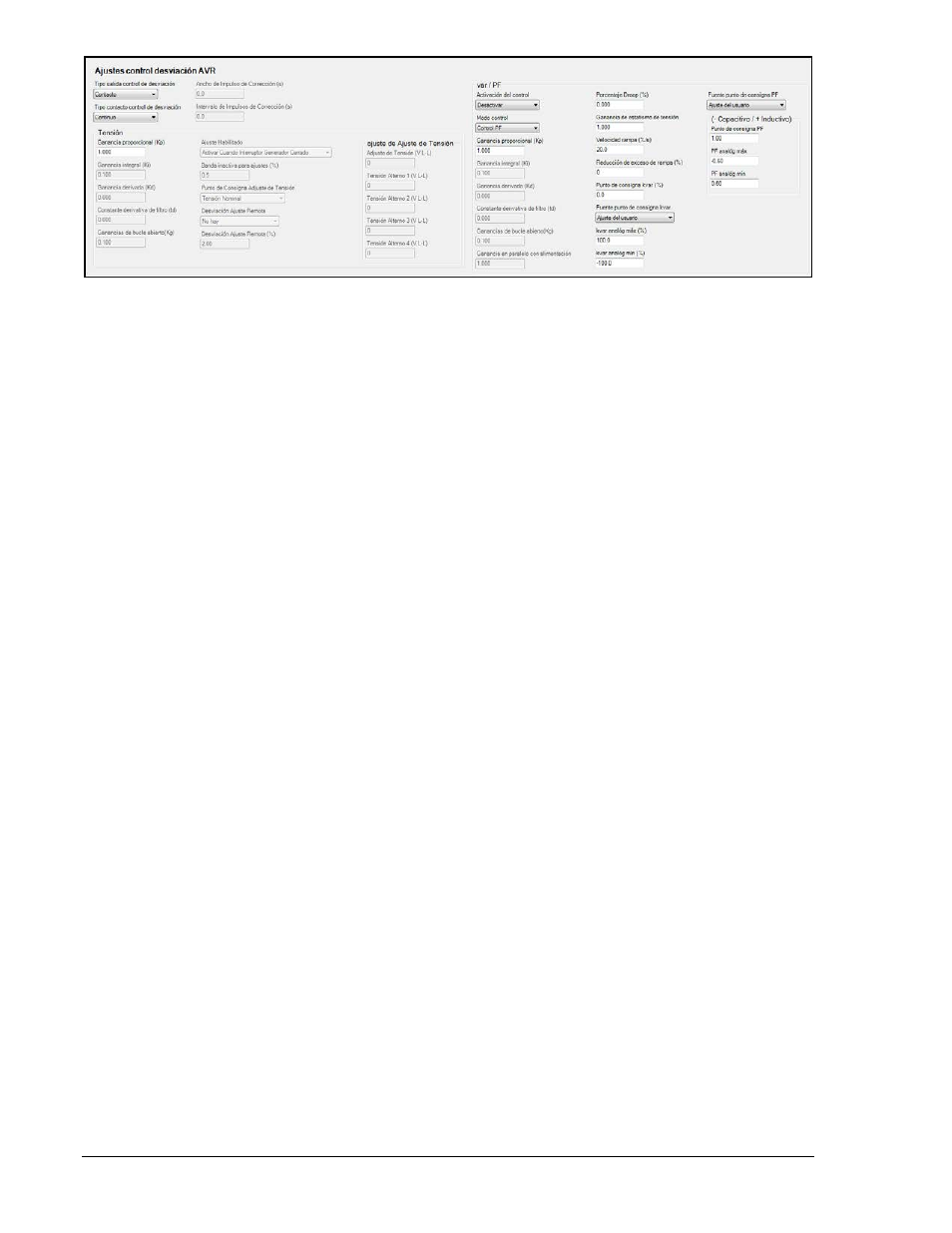
Figura 7-60. Explorador de Configuración, Ajustes Control Desviación, pantalla Ajustes control desviación
AVR
i Tipo de Salida de Control de Desviación - Seleccione Contacto o Analógica, de
acuerdo a la implementación de la máquina.
ii Tipo de Contacto Control de Desviación - Selecciones Continuo o Proporcional,
dependiendo del tipo de contacto de salida. Proporcional es una implementación
basada en PWM. El ciclo de trabajo crece cuando más salida de control es
requerida. Este parámetro no puede ser programado si el Tipo de Salida de Control
de Desviación está puesta a Analógico dado que no es aplicable a salidas
analógicas.
iii Intervalo de Impulso de Corrección – Este ajuste define la duración en segundos
entre la salida de pulsos para salidas de contacto proporcionales. Esta es la inversa
de la frecuencia de los pulsos. Este parámetro no puede ser programado si el Tipo
de Salida de Control de Desviación está puesta a Analógico o el tipo de Contacto
Control Desviación está en Contínuo dado que no es aplicable en ningún caso.
iv Ancho de Pulso de Corrección – Establece el máximo ancho de un pulso de salida
de contacto para salidas de contacto proporcionales. Este es el máximo tiempo en
“encendido” permitido par alas salidas proporcionales. Este parámetro no puede ser
programado si el Tipo de Salida de Control de Desviación está puesta a Analógico o
el tipo de Contacto Control Desviación está en Contínuo dado que no es aplicable en
ningún caso.
v Ganancias del Controlador de Tensión (Kp, Ki, Kd, Td, Kg) – Hay cuatro
Proporcional - Integral - Derivativa (PID) controladores involucrados cuando un DGC-
2020 y LSM-2020 son usados en sistema de reparto de carga o control de carga.
Las ganancias de los controladores son discutidas abajo. Las ganancias del
controlador son configuradas como parte del proceso de sintonización. Los procesos
de sintonización para todos los controladores PID son presentados en el Apéndice
C, Sintonización de Ajustes PID. La sintonización del controlador es realizada luego
de que todos los ajustes han sido configurados y es el último paso en configurar un
DGC-2020 y LSM-2020 para reparto de carga o control de carga.
Las ganancias del controlador de velocidad son:
(1) Controlador de Tensión Kp – Ganancia Proporcional
(2) Controlador de Tensión Ki - Ganancia Integral
(3) Controlador de Tensión Kd - Ganancia Derivativa
(4) Controlador de Tensión Td – Constante de tiempo del filtro derivativo
(5) Controlador de Tensión Kg - Ganancia de Lazo, debe ser distinto de cero
para que el control ocurra
vi Banda Inactiva de Trim de Tensión - El error Trim de Tensión se calcula como la
diferencia entre la tensión medida y el punto de ajuste de trim de tensión dividido por
la tensión nominal de la máquina. Cuando esta diferencia es menor que el ajuste de
banda inactiva de trim, el controlador de trim de tensión lo tratará como un error de
cero. Si el funcionamiento del sistema parece "nervioso" cuando el trim de tensión
está habilitado, establecer una banda inactiva no cero podría proporcionar un
funcionamiento más fluido del sistema. Además, si las máquinas parecen no
7-58
DGC-2020 Instalación
9400272990 Rev X