Tabla 4-4. dirección canbus para tipo ecu -23 – Basler Electric DGC-2020 Manual del usuario
Página 141
Cuando se habilita
B
, el DGC-2020 recibirá y conservará los códigos de diagnóstico de averías (DTCs) no
solicitados de una ECU con capacidades DTC.
Las primeras versiones de las especificaciones J1939 no eran claras acerca de cómo los 19 bits de los
SPN se organizaban en sus lugares asignados en los datos. Si bien estaba claro qué bytes y bits
contenían los 19 bits de datos de SPN, no estaba claro si los datos dentro de los bytes estaban
organizados con el primer bit más significativo o el primer bit menos significativo. Tampoco estaba claro
cuál byte era el más significativo y cuál era menos significativo. La ambigüedad llevó a varios fabricantes
de motores a la adopción de tres métodos diferentes de conversión de datos en números SPN.
Esto se solucionó en las especificaciones J1939 y el bit de Método de Conversión SPN
C
fue agregado.
Cuando este bit es cero, el método de conversión se indica como versión 4. El DGC-2020 va a ajustar
automáticamente el método de conversión a 4 cuando el bit CM sea igual a cero; esto ocurre para la
mayoría de los tipos de motores. Sin embargo, si el bit CM es 1, lo que indica que el método de
conversión SPN no es 4, el usuario deberá consultar al fabricante del motor para conocer el método
correcto de conversión SPN y así establecer la configuración del Método de Conversión SPN en el DGC-
2020.
Un DGC-2020 que funciona en una red CANbus se identifica mediante un número de dirección único
D
. La
Dirección CANBus es establecida internamente por el DGC-2020 cuando cierto tipo de ECUs son
seleccionados en la pantalla Configuración ECU, y en este caso, el valor ingresado por ususario no
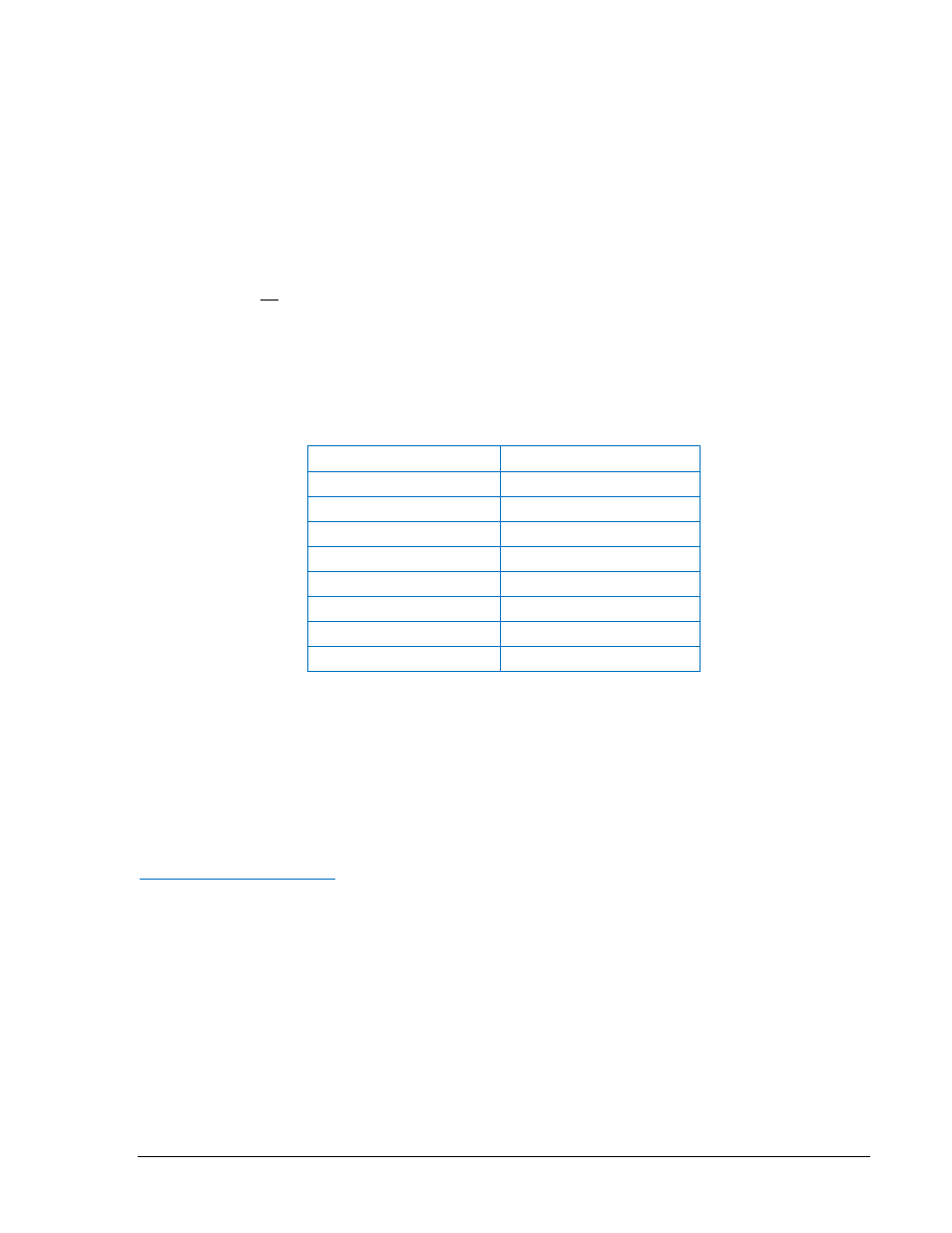
aplica. Ver Tabla 4-4.
Tabla 4-4. Dirección CANBus para Tipo ECU
Tipo ECU
Dirección CANBus
Estándard
Seleccionable por Usuario
Volvo Penta
17
MTU MDEC
6
MTU ADEC
1
MTU ECU7/ECU8
6
GM/Doosan
Seleccionable por Usuario
Cummins
220
MTU Smart Connect
234
En aplicaciones en las que la ECU no tiene una alimentación continua, el DGC-2020 puede suministrar
energía la ECU y enviar impulsos a la ECU para actualizar sus datos de control del motor. Es posible
utilizar el RUN del DGC-2020 o la salida del relé de Prearranque para aplicar potencia a la ECU
E
. Si se
selecciona el contacto de Prearranque, la salida RUN se cerrará aún durante el lanzamiento y el
funcionamiento del grupo electrógeno a fin de indicar aparte que el grupo electrógeno está funcionando.
Para aplicaciones donde no se requiere enviar impulsos a la ECU, se puede desactivar esta función
F
de
impulsos.
El la pantalla de Configuración del CANBus ilustrada en la Figura 4-19
Limitaciones de las ECUs
Con ciertos modelos de ECU, no se puede parar el motor con una fuente externa sin cortar la
alimentación de la ECU. La única manera de cortar el combustible del motor y apagarlo es
interrumpiendo la alimentación de la ECU. Los fabricantes de ECUs aplican sus propios límites del
régimen motor para reiniciar el trasiego de combustible al motor. Si se pone la ECU en marcha y el motor
sigue funcionando a un régimen superior a 60 rpm, la ECU activa automáticamente la alimentación de
combustible. Las ECUs J1939 de Detroit Diesel, por ejemplo, se configuran con un punto límite de 60
rpm.
La imposibilidad de parar el motor sin cortar la alimentación de la ECU plantea dos problemas. El
primero, es que la única manera de parar el motor consiste en apagar la ECU y esperar que la velocidad
del motor disminuya por debajo de las 60 rpm antes de volver a poner la ECU en marcha. De lo contrario,
el motor sigue funcionando. El segundo problema se plantea porque, con la ECU apagada, no se pueden
medir y actualizar el nivel del refrigerante, la prealarma / alarma de la temperatura del refrigerante y el
control del lanzamiento.
9400272990 Rev X
DGC-2020 Software BESTCOMSPlus
®
4-23