9 selección del diálogo de programación para $mdi – HEIDENHAIN TNC 426 (280 462) Manual del usuario
Página 308
295
HEIDENHAIN TNC 426
14.9 Selección del diálogo de
programación para $MDI
Con la función MOD INTRODUCCION DEL PROGRAMA se
conmuta el diálogo de programación del fichero $MDI:
■
Programación de $MDI.H en texto claro:
INTRODUCCION DEL PROGRAMA: HEIDENHAIN
■
Programación de $MDI.I según la norma DIN/ISO:
INTRODUCCIÓN DEL PROGRAMA: ISO
14.10 Selección del eje para la
elaboración de una frase L
En el campo de introducción para la SELECCION DEL EJE se
determina, qué coordenadas de la posición de la hta. actual se
aceptan en una frase L. La generación de una frase L por separado
se realiza con la tecla “Aceptar posición real“. La selección de los
ejes se realiza igual que en los parámetros de máquina según el bit
correspondiente:
SELECCIÓN DEL EJE
%11111 Aceptar ejes X, Y, Z, IV., V.
SELECCIÓN DEL EJE
%01111 Aceptar ejes X, Y, Z, IV.
SELECCIÓN DEL EJE
%00111 Aceptar ejes X, Y, Z
SELECCIÓN DEL EJE
%00011 Aceptar ejes X, Y
SELECCIÓN DEL EJE
%00001 Aceptar eje X
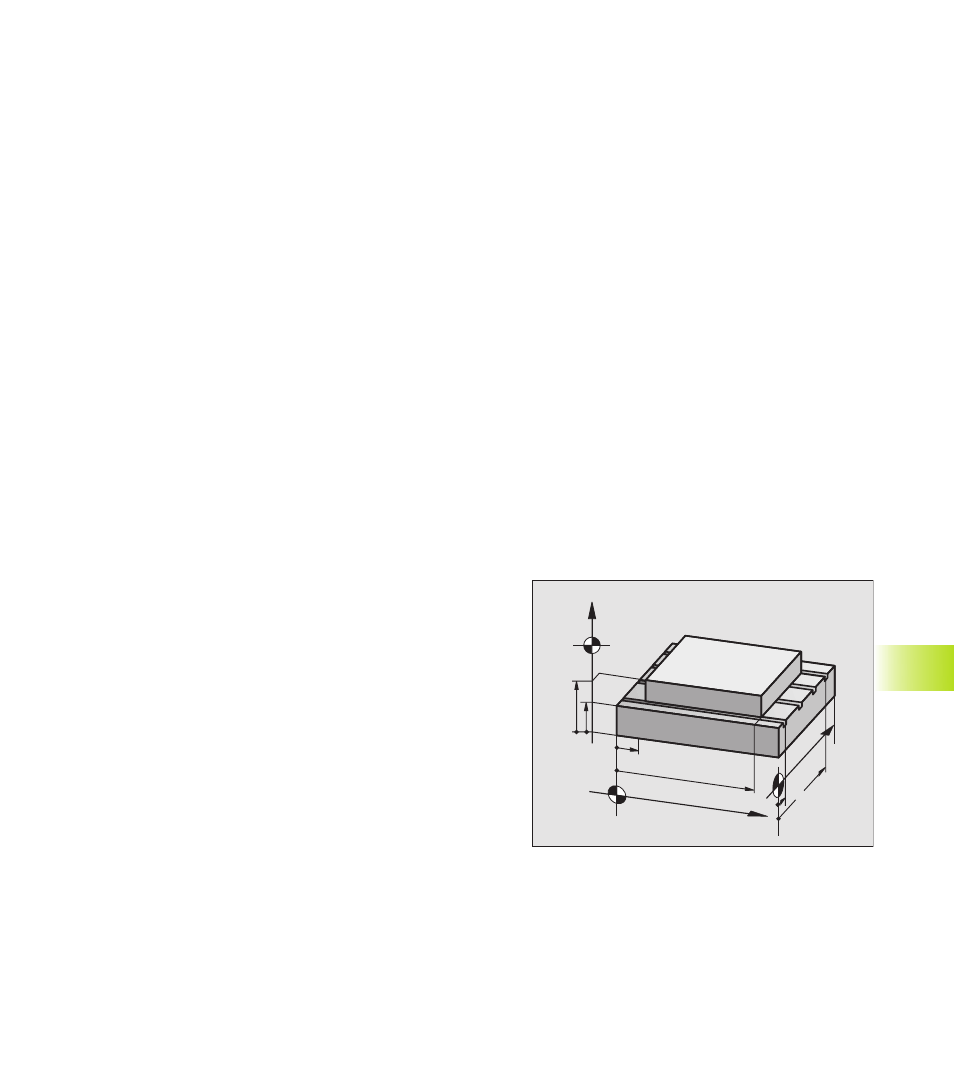
14.11 Introducción de los margenes de des-
plazamiento, visualización pto. cero
Dentro del margen de los finales de carrera máximos se puede
delimitar el recorrido útil para los ejes de coordenadas.
Ejemplo de empleo: Asegurar el divisor óptico contra colisiones
El máximo margen de desplazamiento se delimita con los finales de
carrera. El verdadero recorrido útil se delimita con la función MOD
AXIS LIMIT. Para ello los valores máximos de los ejes en dirección
positiva y negativa se refieren al punto cero de la máquina del
sistema de medida.
Mecanizado sin limitación del margen de desplazamiento
Para los ejes de coordenadas sin limitación del margen de
desplazamiento, se introduce el recorrido máximo del TNC
(+/- 99 999 mm) como AXIS LIMIT.
14.9 Selec.
del diálog
o de pr
ogr
amación par
a $MDI,
14.1
0 Selec.
del eje par
a la elabor
ación de una
fr
ase L,
14.1
1 Intr
oducción de los mar
g
enes de desplazamient
o
, visualización del punt
o cer
o
Z
Y
X
Z
min
Z
max
X
min
Y
max
Y
min
X
max