2 fijar un punto de referencia con palpadores 3d – HEIDENHAIN TNC 426 (280 462) Manual del usuario
Página 276
263
HEIDENHAIN TNC 426
Anulación del giro básico
ú
Seleccionar la función de palpación: Pulsar la softkey PROBING
ROT
ú
Introducir el ANGULO DE GIRO “0“ y aceptar con la tecla ENT
ú
Finalizar la función de palpación: Pulsar la tecla END
12.2 Fijar un punto de referencia con
palpadores 3D
Las funciones para la fijación del punto de referencia en la pieza, se
seleccionan con las siguientes softkeys:
■
Fijar el punto de ref. en el eje deseado con PROBING POS
■
Fijar la esquina como punto de ref. con PROBING P
■
Fijar un punto central del círculo como punto de ref. con
PROBING CC
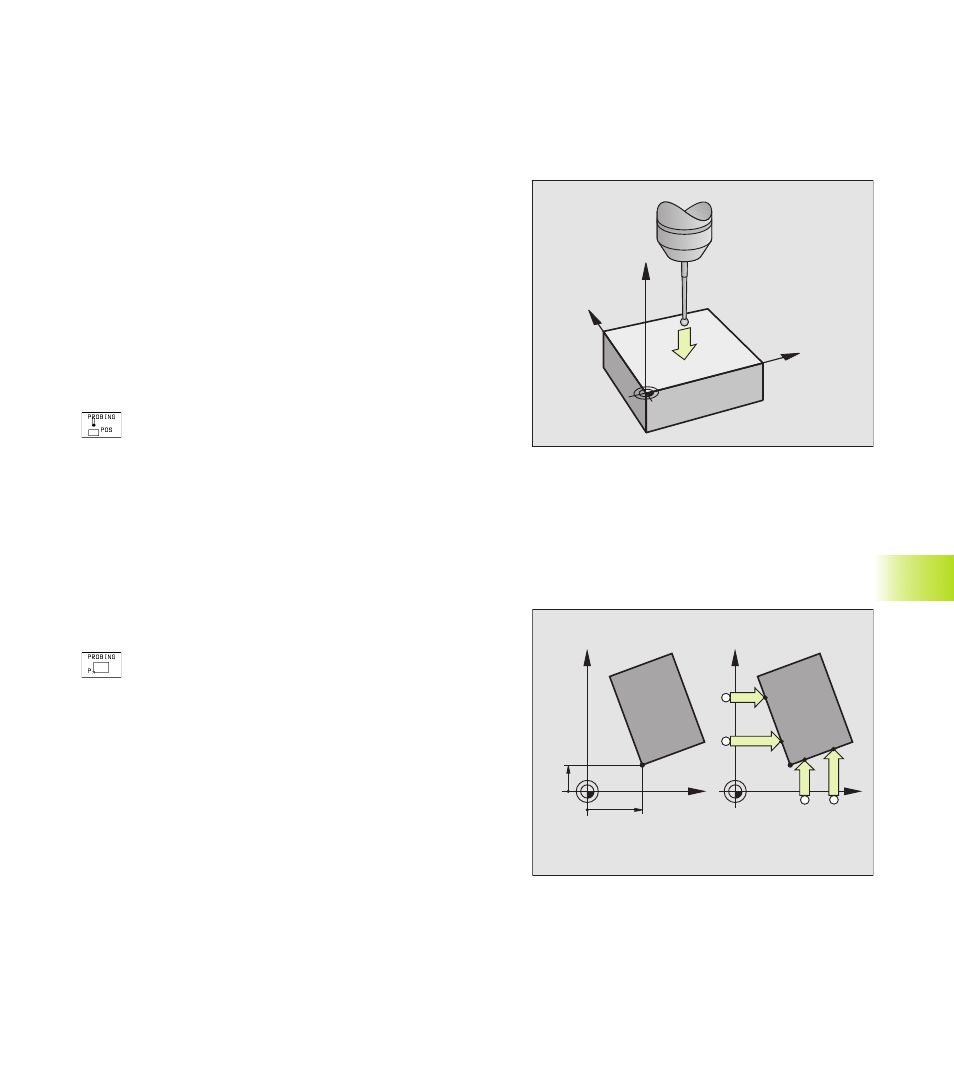
Fijar el punto de ref. en cualquier eje (véase fig. arriba a la dcha.)
ú
Seleccionar la función de palpación: Pulsar la softkey
PROBING POS
ú
Posicionar el palpador cerca del punto de palpación
ú
Seleccionar simultáneamente la dirección de palpación
y el eje para los cuales se ha fijado el punto de ref. p.ej.
palpar Z en dirección Z: seleccionar con las teclas cursoras
ú
Palpación: Accionar el pulsador externo START
ú
PUNTO DE REF.: Introducir las coordenadas nominales
y aceptar con la tecla ENT
Esquina como punto de ref. - Aceptar los puntos palpados para
el giro básico (véase la figura de la derecha)
ú
Seleccionar la función de palpación: Pulsar la softkey
PROBING P
ú
¿PUNTOS DE PALPACION DEL GIRO BÁSICO?: Pulsar
la tecla ENT para aceptar las coordenadas de los puntos
de palpación
ú
Posicionar el palpador cerca del primer punto de palpación
sobre la arista de la pieza palpada para el giro básico
ú
Seleccionar la dirección de palpación: Seleccionar el eje
con las teclas cursoras
ú
Palpación: Accionar el pulsador externo START
ú
Posicionar el palpador cerca del 2º punto de palpación
sobre la misma arista
ú
Palpación: Accionar el pulsador externo START
ú
PUNTO DE REF.: Introducir las dos coordenadas del
punto de ref. en la ventana del menú y aceptar con
ENT
ú
Finalizar la función de palpación: Pulsar la tecla END
12.2 Fijar el punt
o de r
e
fe
rencia con palpador
es 3D
Y
X
Z
P
X=?
Y=?
X
Y
P
X
Y