HEIDENHAIN TNC 426B (280 472) ISO programming Manual del usuario
Página 126
110
6 Programación: Contornos
6.5 Tipos
de
tr
a
y
ect
o
ria - Coor
denadas polar
es
6.5 Tipos de trayectoria – Coordenadas
polares
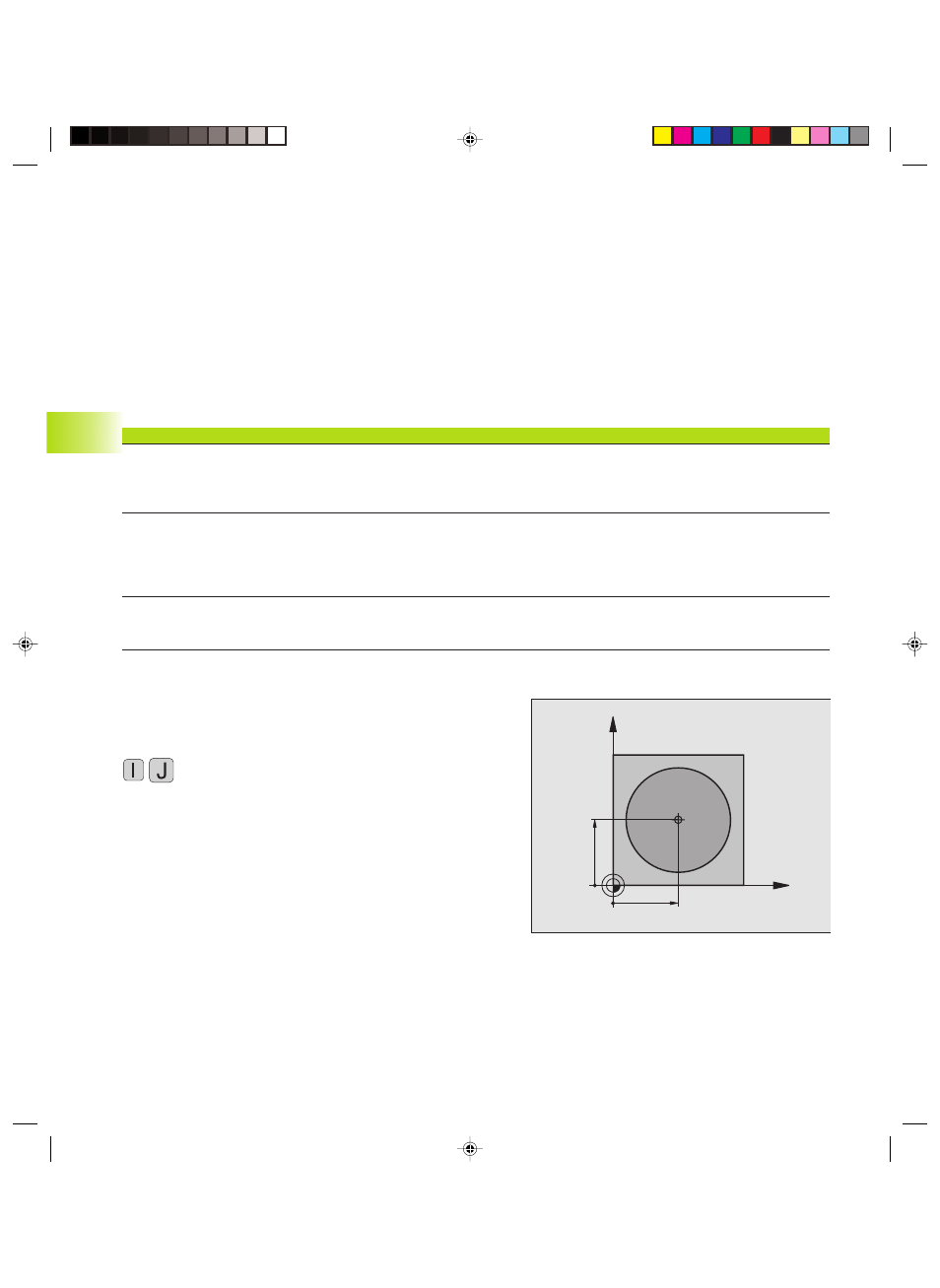
Con las coordenadas polares se determina una posición mediante un
ángulo H y una distancia R al polo I, J definido anteriormente. Véase el
capítulo ”4.1 Principios básicos”.
Las coordenadas polares se utilizan preferentemente para:
■
Posiciones sobre arcos de círculo
■
Planos de la pieza con indicaciones angulares, p.ej. círculo de
taladros
X
Y
X=I
Y=J
Resumen de los tipos de trayectoria con coordenadas polares
Movimiento de la hta.
Función
Introducciones precisas
Recta en marcha rápida
G10
Radio en polares, ángulo en polares del punto final de la
recta
Recta con avance F
G11
Trayectoria circular en sentido horario
G12
Angulo en polares del punto final del círculo
Trayectoria circular en sentido antihorario
G13
Trayectoria circular en la
G15
dirección de giro activada
Trayectoria circular tangente
G16
Radio en polares, ángulo en polares del punto final del
Unión al tramo anterior del contorno
círculo
Origen de coordenadas polares: polo I, J
El polo I se puede determinar en cualquier posición del programa de
mecanizado, antes de indicar las posiciones en coordenadas polares.
Para determinar el polo se procede igual que para la programación del
punto central del círculo.
ú
Introducir el polo en coordenadas cartesianas o
Para
aceptar la última posición programada: Introducir G29
Gkap6.pm6
28.06.2006, 14:36
110