Procedimientos de puesta a punto – Basler Electric DGC-2020HD Manual del usuario
Página 396
386
9469372990 Rev B
constante K
p
, llamada ganancia proporcional. La K
p
más grande, por lo general, significa una
respuesta más rápida, ya que cuanto mayor sea el error, mayor será la retroalimentación para
compensar. Una ganancia proporcional excesivamente grande producirá la inestabilidad del proceso.
•
K
i
- Ganancia integral: la contribución del término integral es proporcional a la magnitud del error y la
duración del error. Se necesita alguna ganancia integral para que el sistema logre un error de estado
estable cero. El término integral (cuando se agrega al término proporcional) acelera el movimiento del
proceso hacia el punto de ajuste y elimina el error de estado estable residual que se produce con un
controlador solo proporcional. Una K
i
más grande implica que los errores de estado estable se eliminan
más rápido. La compensación es un exceso mayor: cualquier error negativo integrado durante una
respuesta transitoria se debe integrar mediante error positivo antes de alcanzar el estado estable.
•
K
d
- Ganancia derivada: el término derivada reduce la frecuencia de cambio de la salida del
controlador, y se utiliza para reducir la magnitud del exceso producido por el componente integral
y mejorar la estabilidad combinada del controlador-proceso. Sin embargo, la diferenciación de
una señal amplifica un ruido en la señal y así este término del controlador puede ser sensible al
ruido en el término del error, y puede provocar un proceso para volverse inestable si el ruido y la
ganancia derivada son lo suficientemente grandes. Una K
d
más grande disminuye el exceso y
disminuye la velocidad de la respuesta transitoria; esto puede provocar inestabilidad.
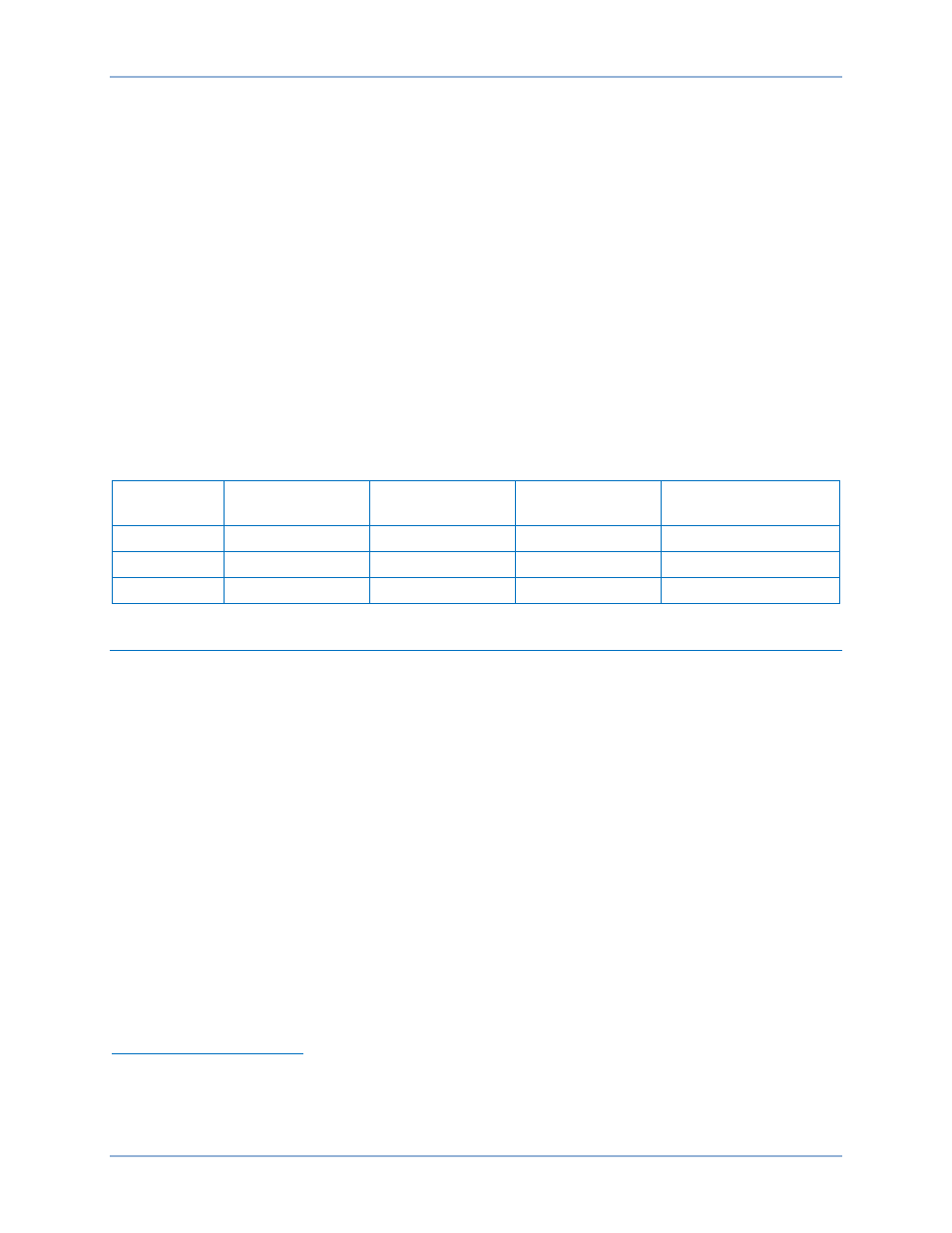
La Tabla 97 muestra los efectos de los parámetros en aumento.
Tabla 97. Efectos de los parámetros en aumento
Parámetro
Tiempo
de subida
Exceso
Tiempo de
estabilización
Error de
estado estable
Kp
Disminuir
Aumentar
Cambio pequeño
Disminuir
Ki
Disminuir
Aumentar
Aumentar
Eliminar
Kd
Cambio pequeño
Disminuir
Disminuir
Ninguno
Procedimientos de puesta a punto
Procedimiento de puesta a punto del controlador de tensión
El controlador de tensión se pone a punto antes que el controlador de velocidad. Establezca todas las
ganancias Kp, Ki y Kd en el controlador de tensión, el controlador de velocidad y el controlador de carga en
kW en 0. Establezca los valores de Kg en 0,1. Arranque el generador.
El controlador de tensión está activo únicamente durante la sincronización cuando el DGC-2020HD intenta
cerrar el disyuntor del generador. Para sintonizarlo, se debe conectar una fuente de tensión de c.a. en la
entrada del bus del DGC-2020HD. Se debe arrancar el generador; luego se debe iniciar una secuencia de
cierre del disyuntor aplicando un pulso de cierre del disyuntor a una entrada de contacto discreta para
activar el sincronizador. Además, se deben establecer los parámetros Tiempo de espera de cierre del
disyuntor y Falla de retardo de activación de sincronización en un valor elevado, como 120 segundos o
más. Esto hará que el controlador de tensión funcione durante un tiempo lo suficientemente prolongado
como para obtener información de respuesta significativa.
Si el sincronizador caduca durante el proceso de puesta a punto provocando una prealarma de falla del
sincronizador o se produce una falla en el cierre del disyuntor durante la puesta punto, presione el botón
Restablecer que está en el frente del DGC-2020HD para borrar la prealarma asociada. Luego envíe un
pulso abierto del disyuntor a una entrada de contacto discreta. Ahora se restablece el sincronizador; por
lo tanto, se puede aplicar un pulso a la entrada de contacto discreta del cierre del disyuntor para volver a
arrancar el sincronizador. En este punto, se puede reanudar la puesta punto.
KP - Ganancia proporcional
Establezca un valor inicial de 1 para KP.
Cada vez que se establezca KP, perturbe el sistema cambiando la tensión en la entrada del bus del
DGC-2020HD para que el DGC-2020HD intente seguirlo. Verifique que la salida del generador se
aproxime al nuevo valor de manera estable. Dado que KI es cero en este punto, es posible que existan
Ajuste de Configuración de PID
DGC-2020HD