Señal de potencia mecánica derivada -35, Selección de la señal de estabilización -35 – Basler Electric DECS-400 Manual del usuario
Página 89
Power
Potencia
Enable
Habilitar
Disable
Inhabilitar
Washed Out Power
Potencia disminuida
Señal de potencia mecánica derivada
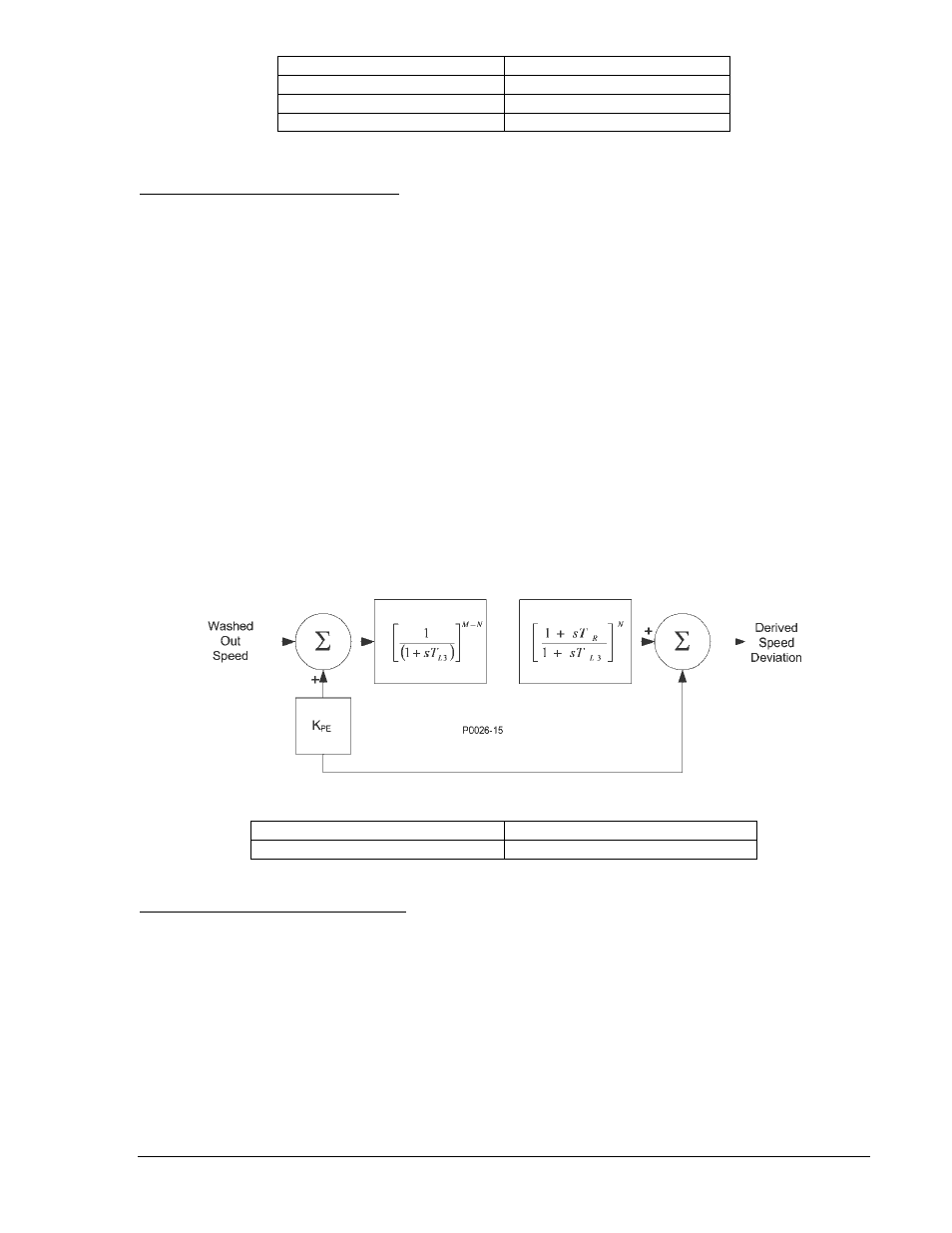
La señal de desviación de velocidad y la integral de la señal de desviación de potencia eléctrica se
combinan para producir una integral derivada de la señal de potencia mecánica.
Se proporciona una etapa de ganancia ajustable, Kpe, que posee un intervalo de ajuste de 0 a 2,00 con
incrementos de 0,01. El ajuste Kpe se encuentra en la ficha Parameters (Parámetros) de la pantalla PSS
de BESTCOMS.
La integral derivada de la señal de potencia mecánica pasa a través de un filtro de potencia mecánica de
paso bajo y un filtro de seguimiento de rampa. El filtro de paso bajo es controlado a través de la
constante de tiempo TI3 y proporciona atenuación de los componentes torsionales que aparecen en la
ruta de entrada de velocidad. El ajuste TI3 posee un intervalo de ajuste de 0,05 segundos a
0,20 segundos con incrementos de 0,01 segundo. El filtro de seguimiento de rampa produce un error de
estado permanente cero en los cambios de rampa en al integral de la señal de entrada de potencia
eléctrica. Esto limita la variación de salida del estabilizador a niveles muy bajos para las tasas de
variación de potencia mecánica que normalmente se encuentran durante la operación de los
generadores de escala de servicios de energía eléctrica. El filtro de seguimiento de rampa es controlado
a través de la constante de tiempo Tr. El ajuste Tr posee un intervalo de ajuste de 0,05 segundo a
1 segundo con incrementos de 0,01 segundo. Las constantes de tiempo del filtro de paso bajo y del filtro
de seguimiento de rampa se encuentran en la ficha Parameters (Parámetros) de la pantalla PSS de
BESTCOMS.
En la figura Figura 3-18 se muestra el procesamiento de la integral derivada de la señal de potencia
mecánica.
Figura 3-18. Señal de potencia mecánica derivada
Washed Out Speed
Velocidad disminuida
Derived Speed Deviation
Desviación de velocidad derivada
Selección de la señal de estabilización
La Figura 3-19 muestra cómo se utilizan los
interruptores de software SSW 2 y SSW 3 para
seleccionar la señal de estabilización. La
desviación de velocidad derivada es
seleccionada como la señal de estabilización
cuando el ajuste SSW 2 es Derived Speed
(Velocidad derivada) y el ajuste SSW 3 es
Derived Frequency/Speed
(Frecuencia/velocidad derivada). La velocidad
disminuida es seleccionada como la señal de
estabilización cuando el ajuste SSW 2 es
Frequency (Frecuencia) y el ajuste SSW 3 es
Derived Frequency/Speed
(Frecuencia/velocidad derivada). La potencia
disminuida es seleccionada como la señal de
estabilización cuando el ajuste SSW 3 es Power
(Potencia). (Cuando el ajuste SSW 3 es Power
[Potencia], el ajuste SSW 2 no tiene efecto). Los
ajustes SSW 2 y SSW 3 se encuentran en la
ficha Control de la pantalla PSS de
BESTCOMS.
9369772990 RevR
Descripción funcional del DECS-400
3-35