Pid calculator (calculador de pid) -24, Figura 4-18. calculador de pid -24 – Basler Electric DECS-400 Manual del usuario
Página 122
AVR – Ki-Integral Gain (AVR: ganancia integral [Ki]). Este ajuste se utiliza para seleccionar el parámetro
de estabilidad de la constante integral (Ki). El DECS-400 proporciona un valor de salida equivalente a la
Ki multiplicada por la integral del error entre el punto de ajuste de tensión y la tensión de salida real del
generador. Se puede ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1. Este ajuste se habilita
solamente cuando Custom (Personalizado) está seleccionado como Primary Gain Option (Opción de
ganancia primaria) de PID Pre-Settings (Preajustes de PID).
Si se considera que el tiempo para alcanzar el estado permanente es muy largo, se debe aumentar la Ki.
AVR – Kd-Derivative Gain (AVR: ganancia derivada [Kd]). Este ajuste se utiliza para seleccionar el
parámetro de estabilidad de la constante derivada (Kd). El DECS-400 proporciona un valor de salida
equivalente a la Kd multiplicada por la derivada del error entre el punto de ajuste de tensión y la tensión
de salida real del generador. Se puede ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1. Este
ajuste se habilita solamente cuando Custom (Personalizado) está seleccionado como Primary Gain
Option (Opción de ganancia primaria) de PID Pre-Settings (Preajustes de PID).
Si la respuesta transitoria tiene demasiadas oscilaciones, se debe aumentar la Kd.
AVR – Td-AVR Derivative Time Constant (AVR: constante de tiempo derivada de AVR [Td]). Este ajuste
se utiliza para eliminar el efecto ruido en la diferenciación numérica. Se puede ingresar un ajuste de 0 a
1,00 en incrementos de 0,01.
AVR – Kg-AVR Loop Gain (AVR: ganancia en bucle de AVR [Kg]). Este ajuste se utiliza para configurar
el nivel de ganancia en bucle aproximado del algoritmo de PID para el modo AVR. Se puede ingresar un
ajuste de 0 a 1000,0 en incrementos de 0,1.
PID Pre-Settings – Primary Gain Option (Preajustes de PID: opción de ganancia primaria). Este menú
desplegable muestra 20 ajustes de ganancia predefinidos y una opción para seleccionar ajustes de PID
personalizados. Los ajustes de ganancia predefinidos enumerados dependen de si se selecciona Main
Field (Campo principal) o Exciter Field (Campo de la excitatriz) como Field Type (Tipo de campo)
(pantalla System Configuration [Configuración del sistema], pestaña Options [Opciones]). Al seleccionar
Custom (Personalizado) en el menú desplegable, se habilita el botón PID Calculator (Calculador de PID).
Botón PID Calculator (Calculador de PID). Al hacer clic en este botón, se abre el calculador de PID que
se muestra en la Figura 4-13. Observe que existe un calculador de PID para los ajustes de ganancia
primaria y los ajustes de ganancia secundaria. El calculador de PID que se abre haciendo clic en el botón
PID Calculator (Calculador de PID) depende de si se selecciona el botón Primary (Primarios) o
Secondary (Secundarios) en la pestaña AVR Gain (Ganancia de AVR).
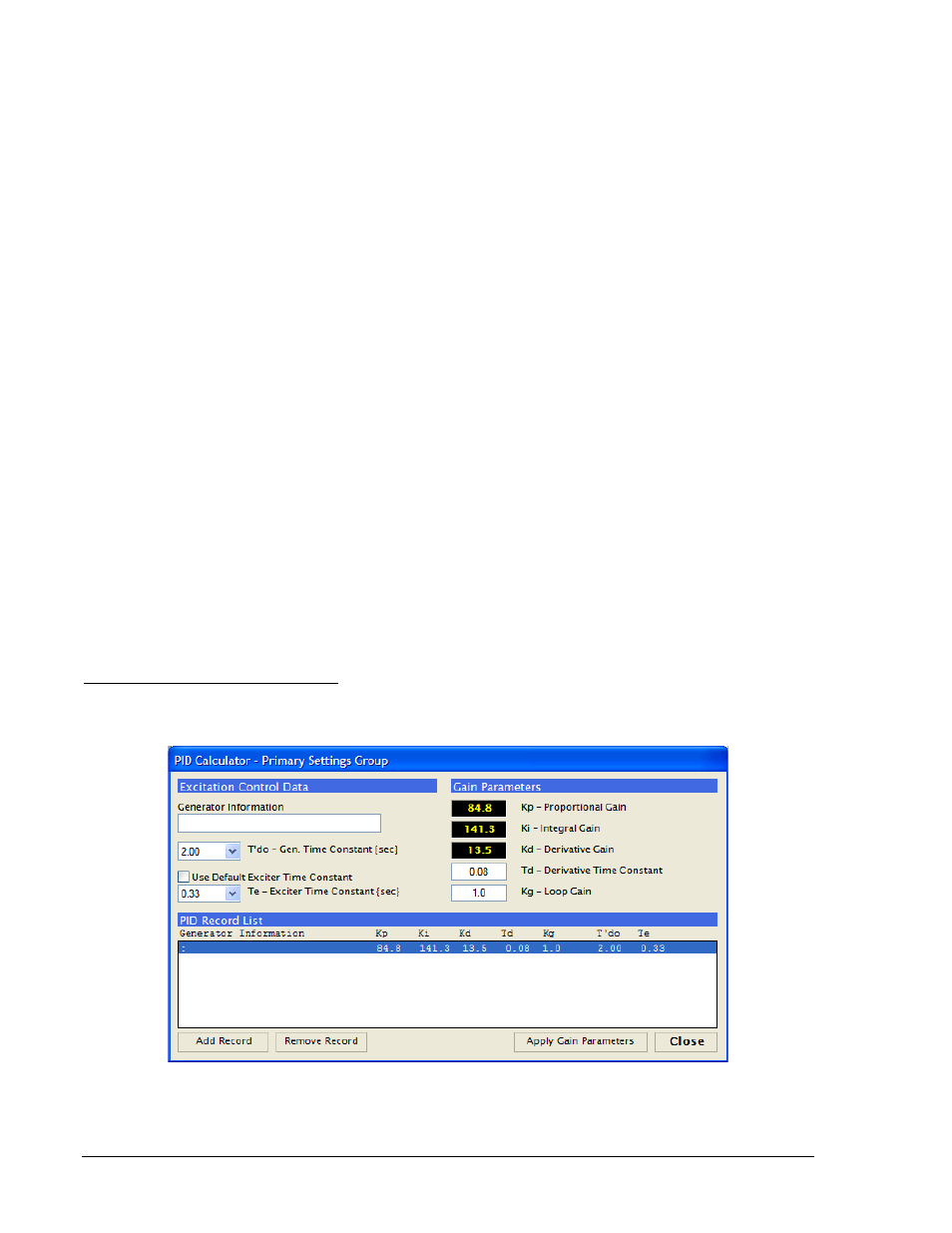
PID Calculator (Calculador de PID)
Las funciones del calculador de PID se muestran en la Figura 4-18 y se describen en los próximos
párrafos.
Figura 4-18. Calculador de PID
Excitation Control Data – Generator Information (Datos de control de excitación: información del
generador). Este campo de ajuste se utiliza para introducir y visualizar un nombre descriptivo para el
4-24
Software BESTCOMS™ del DECS-400
9369772990 Rev R