Basler Electric DECS-400 Manual del usuario
Página 125
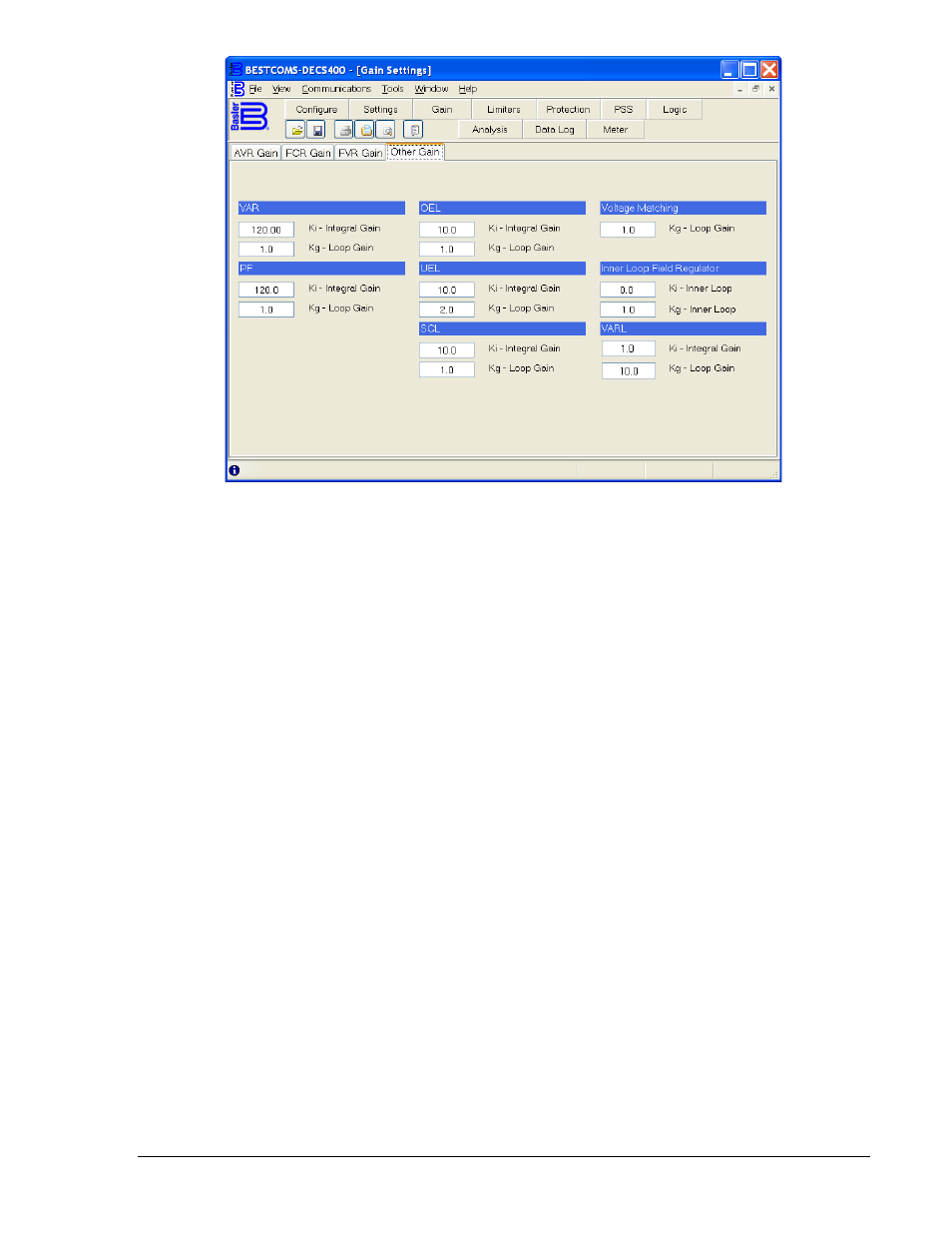
Figura 4-20. Pantalla Ajustes de ganancia, pestaña Otra ganancia
VAR – Ki Integral Gain (VAR: ganancia integral [Ki]). Este ajuste se utiliza para configurar la ganancia
integral, que determina la característica de la respuesta dinámica del DECS-400 ante la modificación de
un ajuste de var. Se puede ingresar un ajuste de 0 a 1000 en incrementos de 0,01.
VAR – Kg-Loop Gain (VAR: ganancia en bucle [Kg]). Este ajuste se utiliza para configurar el nivel de
ganancia en bucle aproximado del algoritmo de PID para el control de var. Se puede ingresar un ajuste
de 0 a 1000,0 en incrementos de 0,1.
PF – Ki-Integral Gain (FP: ganancia integral [Ki]). Este ajuste se utiliza para configurar la ganancia
integral, que determina la característica de la respuesta dinámica del DECS-400 ante la modificación de
un ajuste del factor de potencia. Se puede ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1.
PF – Kg-Loop Gain (FP: ganancia en bucle [Kg]). Este ajuste se utiliza para configurar el nivel de
ganancia en bucle aproximado del algoritmo de PID para el control del factor de potencia. Se puede
ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1.
OEL – Ki-Integral Gain (OEL: ganancia integral [Ki]). Este ajuste se utiliza para configurar la velocidad de
respuesta del DECS-400 durante una condición de sobreexcitación. Se puede ingresar un ajuste de 0 a
1000,0 en incrementos de 0,1.
OEL – Kg-Loop Gain (OEL: ganancia en bucle [Kg]). Este ajuste se utiliza para configurar el nivel de
ganancia en bucle aproximado del algoritmo de PID correspondiente a la función del limitador de
sobreexcitación. Se puede ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1.
UEL – Ki-Integral Gain (UEL: ganancia integral [Ki]). Este ajuste se utiliza para configurar la velocidad de
respuesta del DECS-400 durante una condición de subexcitación. Se puede ingresar un ajuste de 0 a
1000,0 en incrementos de 0,1.
UEL – Kg-Loop Gain (UEL: ganancia en bucle [Kg]). Este ajuste se utiliza para configurar el nivel de
ganancia en bucle aproximado del algoritmo de PID correspondiente a la función del limitador de
subexcitación. Se puede ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1.
SCL – Ki-Integral Gain (SCL: ganancia integral [Ki]). Este ajuste se utiliza para configurar la velocidad a
la que el DECS-400 limita la corriente del estator. Se puede ingresar un ajuste de 0 a 1000,0 en
incrementos de 0,1.
SCL – Kg-Loop Gain (SCL: ganancia en bucle [Kg]). Este ajuste se utiliza para configurar el nivel de
ganancia en bucle aproximado del algoritmo de PID correspondiente a la función del limitador de
corriente del estator. Se puede ingresar un ajuste de 0 a 1000,0 en incrementos de 0,1.
9369772990 Rev R
Software BESTCOMS™ del DECS-400
4-27