Yaskawa V1000 Manual del usuario
Página 229
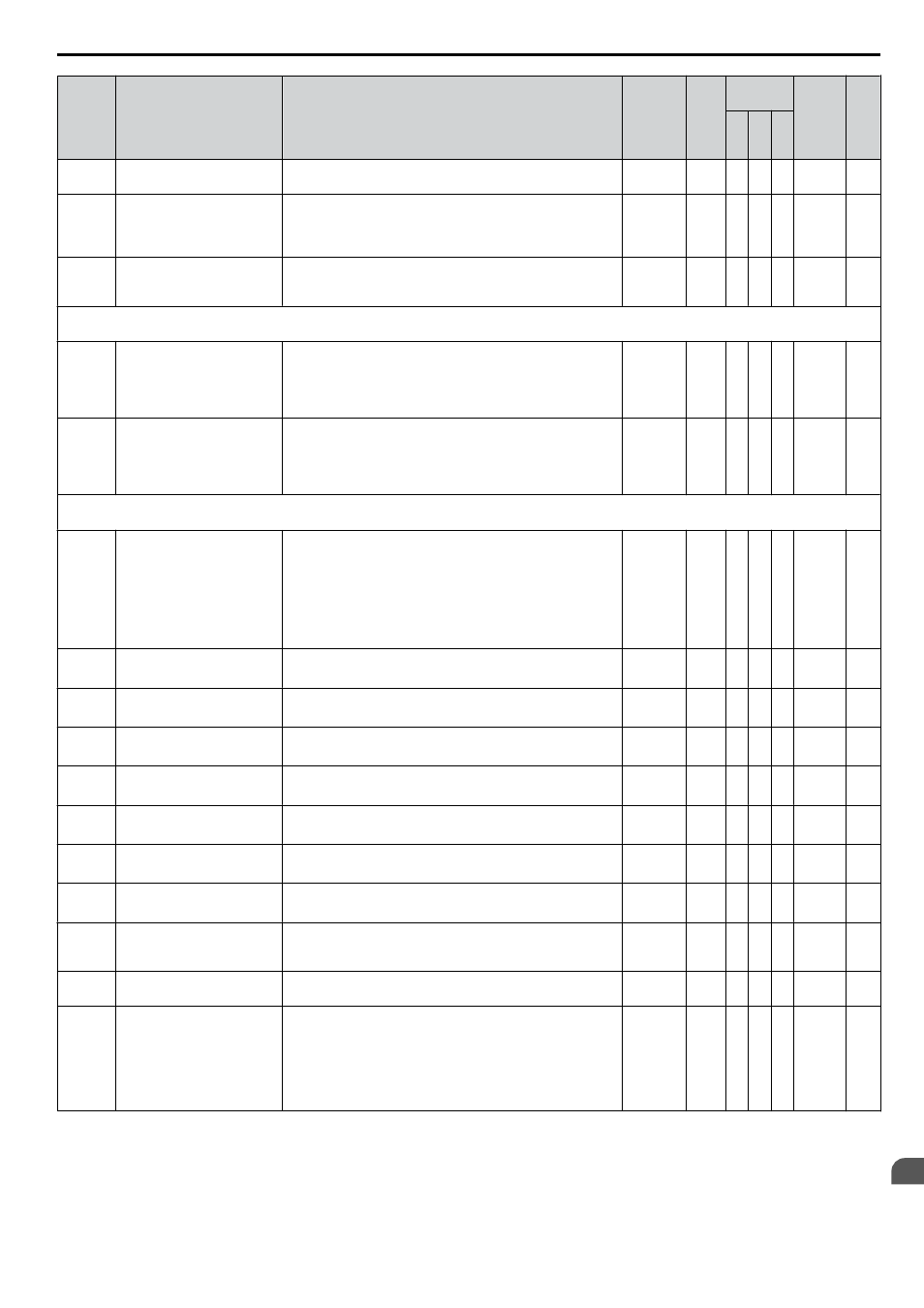
No.
Nombre
Descripción
Rango
Def.
Modo de
Control
Dir.
Hexa
Pág
.
V/
f
O
L
V
P
M
b3-19 Número de reinicios de
búsqueda de velocidad
Configura el número de reinicios posibles para las
operaciones de reinicio de búsqueda de velocidad.
0 a 10
3
A A −
1F2
—
b3-24 Selección de método de
búsqueda de velocidad
Selecciona el método de detección de la búsqueda de
velocidad
0: Tipo de detección de corriente
1: Tipo de estimación de velocidad
0,1
0
A A −
1C0
—
b3-25
Tiempo de Intervalo de
Reintento de Búsqueda de
Velocidad
Configura el tiempo de espera antes de reiniciar la búsqueda
de velocidad
0 a 30.0
0.5 s A A A
1C8
—
b4: Función de Temporizador
Use los parámetros b4 para configurar la operación de la función de temporizador.
b4-01
Tiempo de retardo de
encendido de la función de
temporizador
Usado en conjunto con una entrada digital multifunción (H1-
= 18) y una salida digital multifunción (H2- = 12)
programado para la función de temporizador. Esto configura
la cantidad de tiempo entre el cierre de la entrada digital y la
activación de la salida digital.
0.0 a
300.0
0.0 s A A A
1A3
—
b4-02
Tiempo de Retardo de
Apagado de la Función de
Temporizador
Usado en conjunto con una entrada digital multifunción (H1-
= 18) una salida digital multifunción programada para
la función del temporizador. Esto configura la cantidad de
tiempo que la salida permanece activa después de abrir la
entrada digital.
0 a 300.0 0.0 s A A A
1C8
—
b4: Control de PID
Use los parámetros b5 para configurar la función de control de PID del inversor.
b5-01 Configuración de Función
PID
Configura el modo de control PID.
0: Deshabilitado
1: Habilitar (Desviación controlada por D)
2: Habilitar (Retroalimentación controlada por D)
3: Habilitar (La Desviación es controlada por D, la salida de
PID se agrega a la Ref. de Frec. )
4: Habilitar (La Retroalimentación es controlada por D, la
salida de PID se agrega a la Ref. de Frec. )
0 a 4
0
A A A
1A5
—
b5-02
<22>
Configuración de Ganancia
Proporcional (P)
Configura la ganancia proporcional del controlador PID.
Una configuración de 0.00 desactiva el control P.
0.00 a
25.00
1.00 A A A
1A6
—
b5-03
<22>
Configuración de Tiempo
Integral (I)
Configura el tiempo integral para el controlador PID. Una
configuración de 0.0 desactiva el control integral.
0.0 a
360.0
1.0 s A A A
1A7
—
b5-04
<22>
Configuración del Límite
Integral
Configura la salida máxima posible desde el integrador.
0.0 a
100.0
100.0
%
A A A
1A8
—
b5-05
<22>
Tiempo Derivado (D)
Configura el tiempo derivado del control D. Una
configuración de 0.00 desactiva el control derivado.
0.00 a
10.00
0.00 s A A A
1A9
—
b5-06
<22>
Límite de salida de PID
Configura la salida máxima posible desde el controlador PID
completo.
0.0 a
100.0
100.0
%
A A A
1AA
—
b5-07
<22>
Ajuste de Desfase de PID
Aplica un desfase a la salida del controlador PID.
-100.0 a
+100.0
0.0% A A A
1AB
—
b5-08
<22>
Constante de Tiempo de
Retardo Primario de PID
Configura la cantidad de tiempo para el filtro en la salida del
controlador PID.
0.00 a
10.00
0.00 s A A A
1AC
—
b5-09 Selección de Nivel de Salida
de PID
Configura la dirección de salida del controlador PID.
0: Salida Normal (acción directa)
1: Salida Inversa (acción inversa)
0,1
0
A A A
1AD
—
b5-10 Configuración de Ganancia
de Salida de PID
Configura la Ganancia aplicada a la salida de PID.
0.00 a
25.00
1.00 A A A
1AE
—
b5-11 Selección Inversa de Salida
de PID
Configura la operación del inversor con salida negativa de
PID.
0: El inversor se detiene con una salida negativa de PID
1: La dirección de rotación se invierte con una salida negativa
de PID.
Cuando utilice la configuración 1, asegúrese de que la
operación en reversa es permitida por el parámetro b1-04.
0,1
0
A A A
1AF
—
B.2 Tabla de Parámetros
YASKAWA ELECTRIC TOSP C710606 22B Inversor de CA YASKAWA - V1000 Manual Técnico
229
B
Lista de Parámetros