Yaskawa V1000 Manual del usuario
Página 131
u
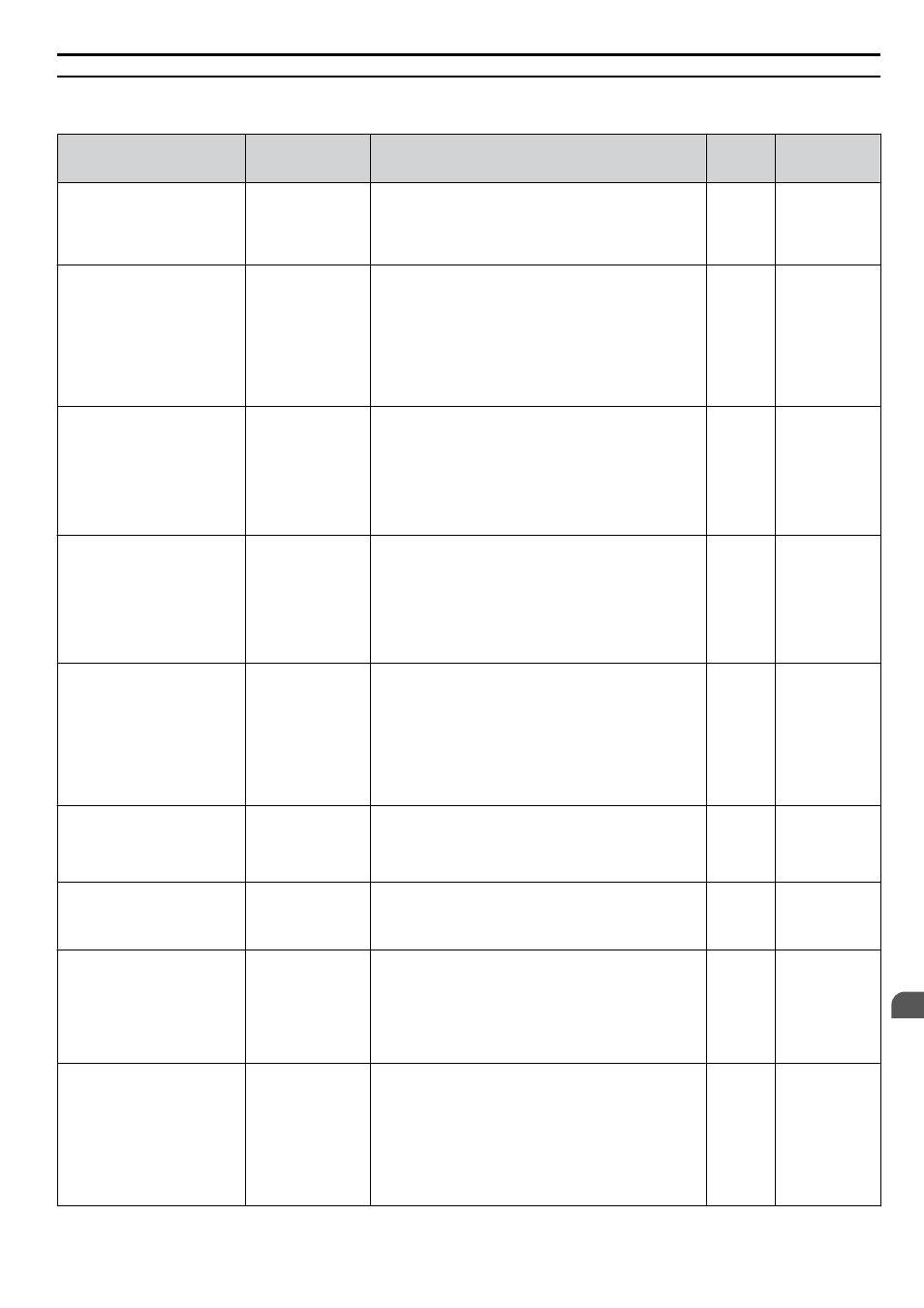
Ajuste del Método de Control de Motor (OLV) de Vector de Ciclo Abierto
Tabla 5.2 Parámetros para Ajustar el Inversor en el Método de Control de Motor OLV
Problema
Parámetro No.
Contramedida
Valor
Predeter
minado
Configuración
Sugerida
• Torque y respuesta de
velocidad de motor pobre
• Control de fluctuación y
oscilación del motor a
velocidades entre 10 y 40 Hz.
Ganancia AFR
(n2-01)
• Si el torque del motor y la respuesta de velocidad son muy
lentos, disminuya gradualmente la configuración en 0.05.
• Si ocurre fluctuación y oscilación en el motor, aumente
gradualmente la configuración en 0.05.
1.00
0.50 a 2.00
• Torque y respuesta de
velocidad del motor pobre
• Control de fluctuación y
oscilación del motor a
velocidades entre 10 y 40 Hz.
Constante de Tiempo
de AFR 1
(n2-02)
• Para mejorar la respuesta de velocidad de torque del
motor, disminuya gradualmente la configuración en 10
ms y compruebe el desempeño.
• Si ocurre fluctuación y oscilación en el motor como
resultado de la inercia de carga, aumente gradualmente la
configuración en 50 ms y compruebe el rendimiento.
Nota: Asegúrese de que n2-02≤ n2-03. Al hacer ajustes a
n2-02, configure C4-02 (Constante de Tiempo de Retardo
Primario de Compensación de Torque 1) de manera acorde.
50 ms
50 a 2000 ms
• El sobrevoltaje se dispara al
acelerar, desacelerar o durante
cambios de velocidad o carga
súbitos.
Constante de Tiempo
de AFR 2
(n2-03)
• Si ocurren disparos de sobrevoltaje, aumente
gradualmente esta configuración en 50 ms.
• Si la respuesta es lenta, reduzca gradualmente esta
configuración por 10 ms.
Nota: Asegúrese de que n2-02≤ n2-03. Al hacer ajustes a
n2-03, aumente el valor de C4-06 (Tiempo de Retraso
Primario de Compensación de Torque 2)
proporcionalmente.
750 ms
750 a 2000 ms
• Torque y respuesta de
velocidad lento
• Fluctuación y oscilación del
motor.
Constante de Tiempo
de Retardo Primario
de Compensación de
Torque 1
(C4-02)
• Para mejorar la respuesta de velocidad de torque del
motor, disminuya gradualmente la configuración en 2 ms
y compruebe el desempeño.
• Si ocurre fluctuación y oscilación en el motor, aumente
gradualmente la configuración en 10 ms.
Nota: Asegúrese de que C4-02≤ C4-06. al hacer ajustes a
C4-02, aumente n2-02 (Constante de Tiempo de AFR )
proporcionalmente.
20 ms
<1>
20 a 100 ms
• El sobrevoltaje se dispara al
acelerar, desacelerar o durante
cambios de velocidad o carga
súbitos
Constante de Tiempo
de Retardo Primario
de Compensación de
Torque 2 (C4-06)
• Si ocurren disparos de sobrevoltaje, aumente
gradualmente la configuración en 10 ms y compruebe el
desempeño.
• Si la respuesta es lenta, reduzca gradualmente esta
configuración en 2 ms y compruebe el desempeño.
Nota: Asegúrese de que C4-02≤ C4-06. Al cambiar C4-06
( Constante de Tiempo de Retardo Primario de
Compensación de Torque 2), aumente el valor de n2-03
proporcionalmente.
150 ms
150 a 750 ms
• Respuesta de velocidad y
estabilidad pobre
Constante de Tiempo
de Retardo Primario
de Compensación de
Deslizamiento
(C3-02)
• Si la respuesta es lenta, reduzca gradualmente la
configuración en 10 ms.
• Si la velocidad es inestable, aumente gradualmente la
configuración en 10 ms.
200 ms
<1>
100 a 500 ms
• Precisión de velocidad pobre
Ganancia de
Compensación de
Deslizamiento
(C3-01)
• Si la velocidad es muy lenta, aumente gradualmente la
configuración en 0.1 ms.
• Si la velocidad es demasiado rápida, disminuya la
configuración gradualmente en 0.1 ms.
1.0
<1>
0.5 a 1.5
• Ruido del Motor
• Ocurre fluctuación y
oscilación del motor de
control a velocidades por
debajo de los 10 Hz.
Selección de
Frecuencia de
Portadora (C6-02)
• Si hay mucho ruido en el motor, la frecuencia de
portadora es demasiado alta.
• Si la fluctuación y oscilación del motor ocurren a bajas
velocidades, disminuya la frecuencia de la portadora.
• La configuración predeterminada para la frecuencia de la
portadora depende de la capacidad del inversor (o2-04) y
la Selección de Trabajo de Inversor (C6-01).
7 (PWM
oscilante
1)
0 a la
configuración
predeterminada
• Torque de motor pobre a bajas
velocidades
• Respuesta de velocidad pobre
• Inestabilidad del motor al
arrancar el motor.
Voltaje de Salida
Media A (E1-08)
Voltaje de Salida
Mínimo (E1-10)
• Si el torque de motor y la respuesta de velocidad son muy
bajas, aumente la configuración.
• Si el motor muestra una inestabilidad excesiva al
arrancar, reduzca la configuración.
Nota:El valor de predeterminado es para unidades de clase
de 200 V. Duplique este valor al utilizar un inversor de clase
de 400 V. Al trabajar con una carga relativamente ligera,
aumentar este valor demasiado puede crear una referencia
de torque excesivamente alta.
E1-08:
12.0 V
<1>
E1-10: 2.5
V
<1>
Inicial ±2 V
5.2 Ajuste Fino del Rendimiento del Motor
YASKAWA ELECTRIC TOSP C710606 22B Inversor de CA YASKAWA - V1000 Manual Técnico
131
5
Solución de Problemas