Requerida obligatoria)” en pág. 436, N véase, Determinar el comportamiento de posicionamiento – HEIDENHAIN iTNC 530 (60642x-03) ISO programming Manual del usuario
Página 436: De la función plane” en pág. 436, Ión: véase "determinar el comportamiento de, Posicionamiento de la función plane" en pág. 436
436
Programación: Mecanizado multieje
12.2 La función PLANE: inclinación del plano de mecanizado (opción de
so
ft
w
a
re
1)
Determinar el comportamiento de
posicionamiento de la función PLANE
Resumen
Independientemente de que función PLANE se utilice para la
definición del plano de mecanizado inclinado están disponibles las
siguientes funciones para el comportamiento del posicionamiento:
Inclinación automática
Selección de posibilidades de inclinación alternativas
Selección del modo de transformación
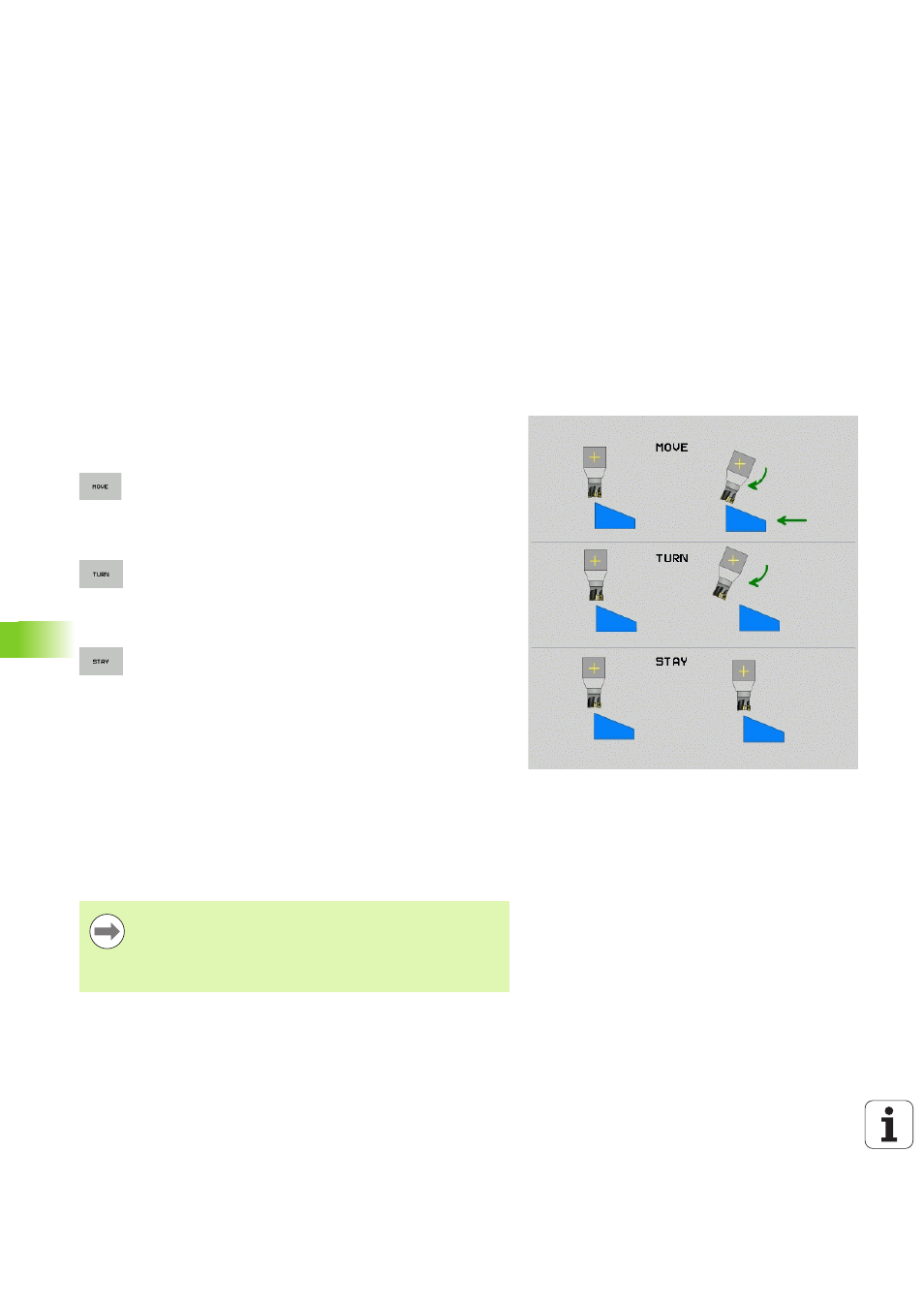
Inclinación automática: MOVE/TURN/STAY (introducción requerida
obligatoria)
Tras haber introducido todos los parámetros para la definición del
plano, debe determinarse, como deben inclinarse los ejes basculantes
al valor del eje calculado:
La función PLANE debe inclinar automáticamente los
ejes basculantes a los valores del eje calculados, en
donde no debe variar la posición relativa entre la pieza
y la herramienta. El TNC ejecuta un movimiento de
compensación en los ejes lineales
La función PLANE debe inclinar automáticamente los
ejes basculantes a los valores del eje calculados, en
donde el TNC sólo posiciona los ejes giratorios. El
TNC no ejecuta ningún movimiento de
compensación en los ejes lineales
Se inclinan los ejes basculantes a continuacion en una
frase de posicionamiento separada
Si se ha seleccionado la opción MOVE (Función PLANE debe realizar la
inclinación automáticamente con movimiento de compensación),
¿están aún los dos parámetros descritos a continuación Distancia del
punto de giro del extremo de la herramienta
y Avance? F= a definir.
Si se ha seleccionado la opción TURN (la función PLANE debe realizar la
inclinación automáticamente sin movimiento de compensación),
¿están aún los siguientes parámetros descritos Longitud de retirada
MB
y Avance? F= a definir.
De forma alternativa a un avance definido directamente mediante un
valor numérico F, también se pueden ejecutar los movimientos
basculantes con FMAX (marcha rápida) o FAUTO (avance desde la frase
T
).
Si se utiliza la función PLANE AXIAL en combinación con
STAY
, entonces deben inclinarse los ejes giratorios en una
frase separada de posicionamiento después de la función
PLANE
.Véase “Inclinación de los ejes basculantes en una
frase separada” en pág. 438