1 nociones básicas, Sistema de referencia – HEIDENHAIN TNC 128 (77184x-01) Manual del usuario
Página 76
76
Programación: Principios básicos, Gestión de ficheros
3.1 Nociones básicas
3.1 Nociones básicas
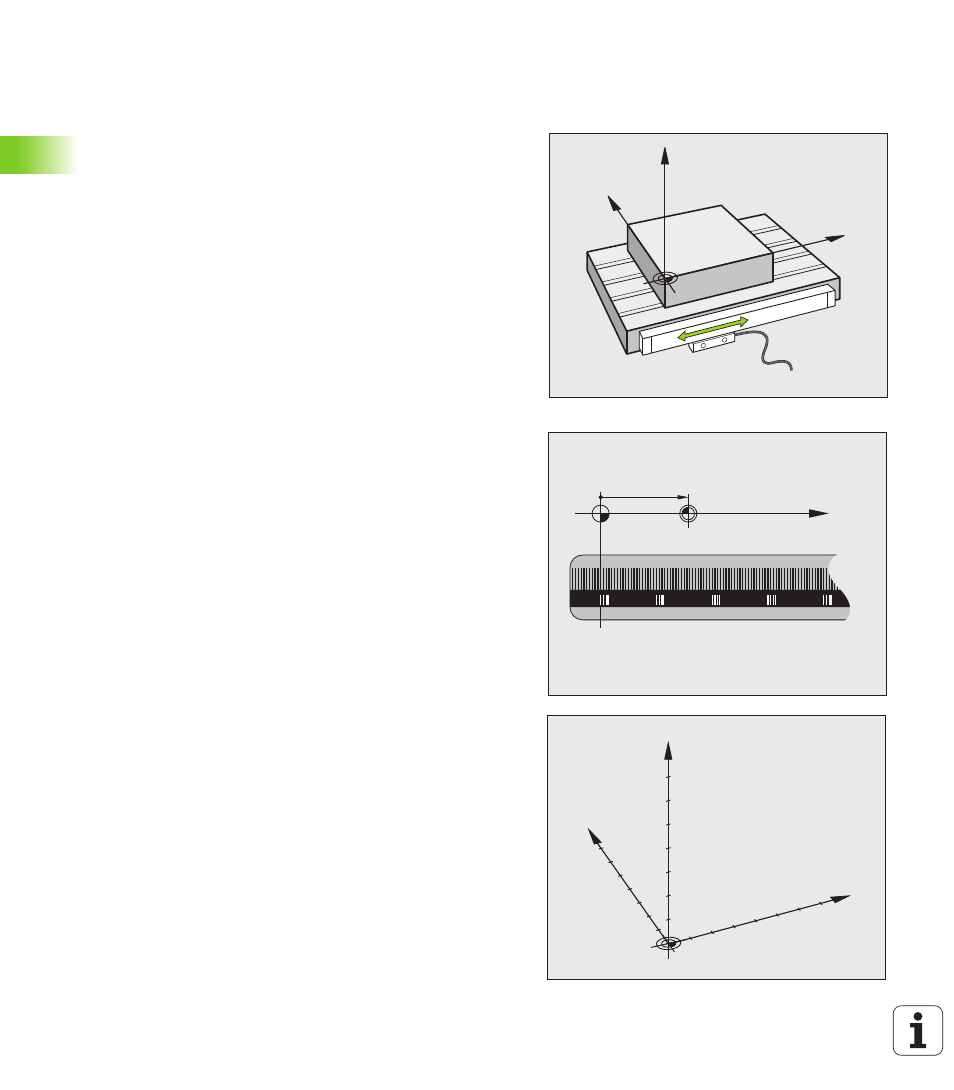
Sistema de medida de recorridos y marcas de
referencia
En los ejes de la máquina hay sistemas de medida, que registran las
posiciones de la mesa de la máquina o de la herramienta. En los ejes
lineales normalmente se encuentran montados sistemas
longitudinales de medida, en las mesas circulares y ejes basculantes
sistemas de medida angulares.
Cuando se mueve un eje de la máquina, el sistema de medida
correspondiente genera una señal eléctrica, a partir de la cual el TNC
calcula la posición real exacta del eje de dicha máquina.
En una interrupción de tensión se pierde la asignación entre la posición
de los ejes de la máquina y la posición real calculada. Para poder volver
a establecer esta asignación, los sistemas de medida incrementales
de trayectoria disponen de marcas de referencia. Al sobrepasar una
marca de referencia el TNC recibe una señal que caracteriza un punto
de referencia fijo de la máquina. Así el TNC puede volver a ajustar la
asignación de la posición real a la posición de máquina actual. En
sistemas de medida longitudinales con marcas de referencia
codificadas debe desplazar los ejes de la máquina un máximo de 20
mm, en sistemas de medida angulares un máximo de 20°.
En sistemas de medida absolutos, después de la puesta en marcha se
transmite un valor absoluto al control. De este modo, sin desplazar los
ejes de la máquina. se vuelve a ajustar la ordenación entre la posición
real y la posición del carro de la máquina directamente después de la
puesta en marcha.
Sistema de referencia
Con un sistema de referencia se determinan claramente posiciones en
el plano o en el espacio. La indicación de una posición se refiere
siempre a un punto fijo y se describe mediante coordenadas.
En el sistema cartesiano están determinadas tres direcciones como
ejes X, Y y Z. Los ejes son perpendiculares entre sí y se cortan en un
punto llamado punto cero. Una coordenada indica la distancia al punto
cero en una de estas direcciones. De esta forma una posición se
describe en el plano mediante dos coordenadas y en el espacio
mediante tres.
Las coordenadas que se refieren al punto cero se denominan
coordenadas absolutas. Las coordenadas relativas se refieren a
cualquier otra posición (punto de referencia) en el sistema de
coordenadas. Los valores de coordenadas relativos se denominan
también coordenadas incrementales.
Y
X
Z
X (Z,Y)
X
MP
Y
X
Z