2 bases del tipo de trayectoria – HEIDENHAIN TNC 426 (280 462) Manual del usuario
Página 91
78
6 Programación: Programación de contornos
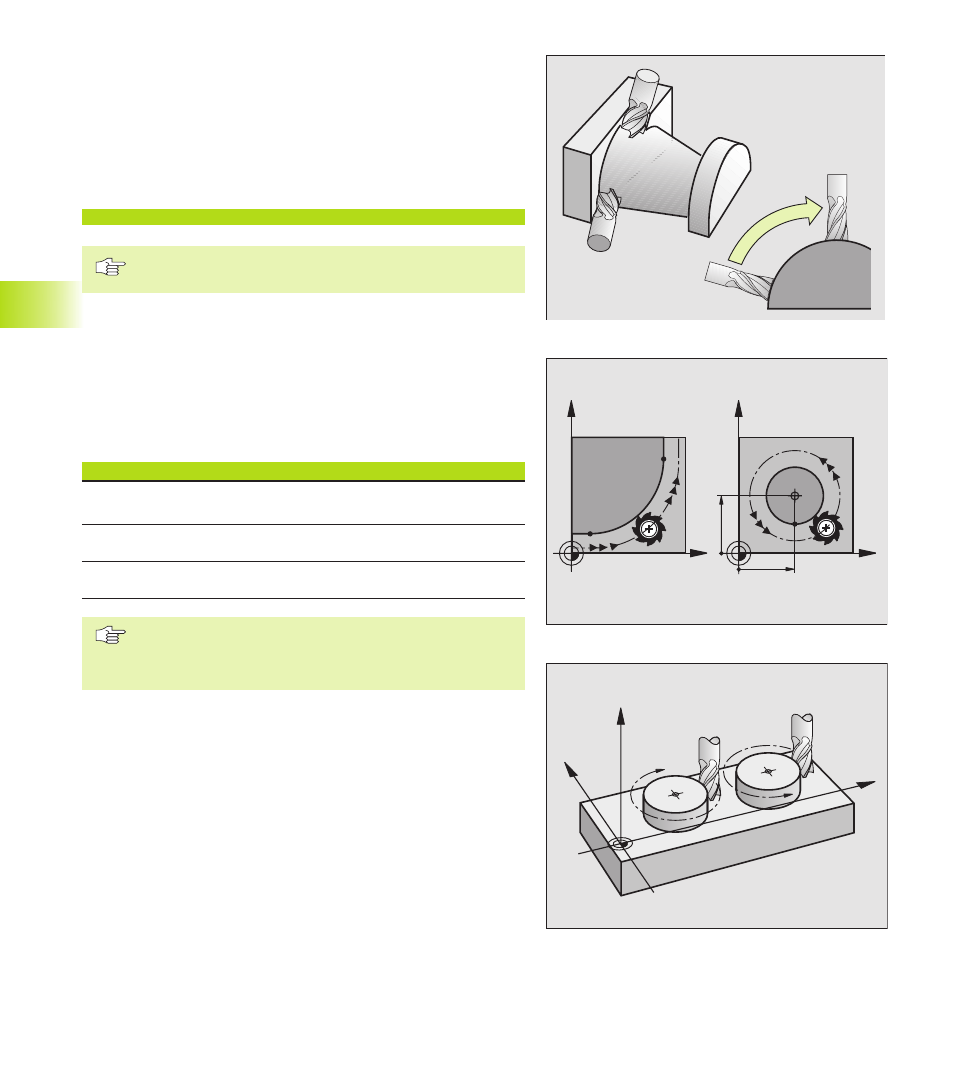
Introducción de más de tres coordenadas
El TNC puede controlar hasta 5 ejes simultáneamente. En un
mecanizado con 5 ejes se mueven por ejemplo, 3 ejes lineales y 2
giratorios simultáneamente.
El programa para un mecanizado de este tipo se genera
normalmente en un sistema CAD y no se puede elaborar en la
máquina.
Ejemplo:
L X+20 Y+10 Z+2 A+15 C+6 R0 F100 M3
El TNC no puede representar gráficamente un
movimiento de más de 3 ejes.
Círculos y arcos de círculo
En los movimientos circulares, el TNC desplaza simultáneamente dos
ejes de la máquina: La herramienta se desplaza respecto a la pieza
según una trayectoria circular. Para los movimientos circulares se puede
introducir el punto central del círculo CC.
Con las trayectorias de arcos de círculo se programan círculos en los
planos principales: El plano principal se define en la llamada a la hta.
TOOL CALL al determinar el eje de la herramienta:
Eje de la herramienta
Plano principal
Z
XY,y también
UV, XV, UY
Y
ZX, y también
WU, ZU, WX
X
YZ, y también
VW, YW, VZ
Los círculos que no son paralelos al plano principal, se
programan con la función “Inclinación del plano de
mecanizado“ (véase página 120) o con parámetros Q
(véase el capítulo 10).
Sentido de giro DR en movimientos circulares
Para los movimientos circulares no tangentes a otros elementos del
contorno se introduce el sentido de giro DR:
Giro en sentido horario: DR–
Giro en sentido antihorario: DR+
Corrección de radio
La corrección de radio deberá estar antes de la frase con las coordena-
das de la 1ª trayectoria del contorno. Esta no puede empezar en una
frase en una trayectoria circular. Dicha corrección se programa antes
de la frase lineal o en una frase de aproximación (frase APPR)
La frase APPR y la frase lineal se explican en los capítulos “6.2
Aproximación y salida del contorno“ y “6.4 Tipos de trayectoria -
Coordenadas cartesianas“.
X
Y
X
Y
CC
X
CC
Y
CC
CC
CC
DR–
DR+
X
Z
Y
6.2 Bases del tipo de trayectoria