1 resumen: movimientos de la hta – HEIDENHAIN TNC 426 (280 462) Manual del usuario
Página 89
76
6 Programación: Programación de contornos
6.1 Resumen: Movimientos de la hta.
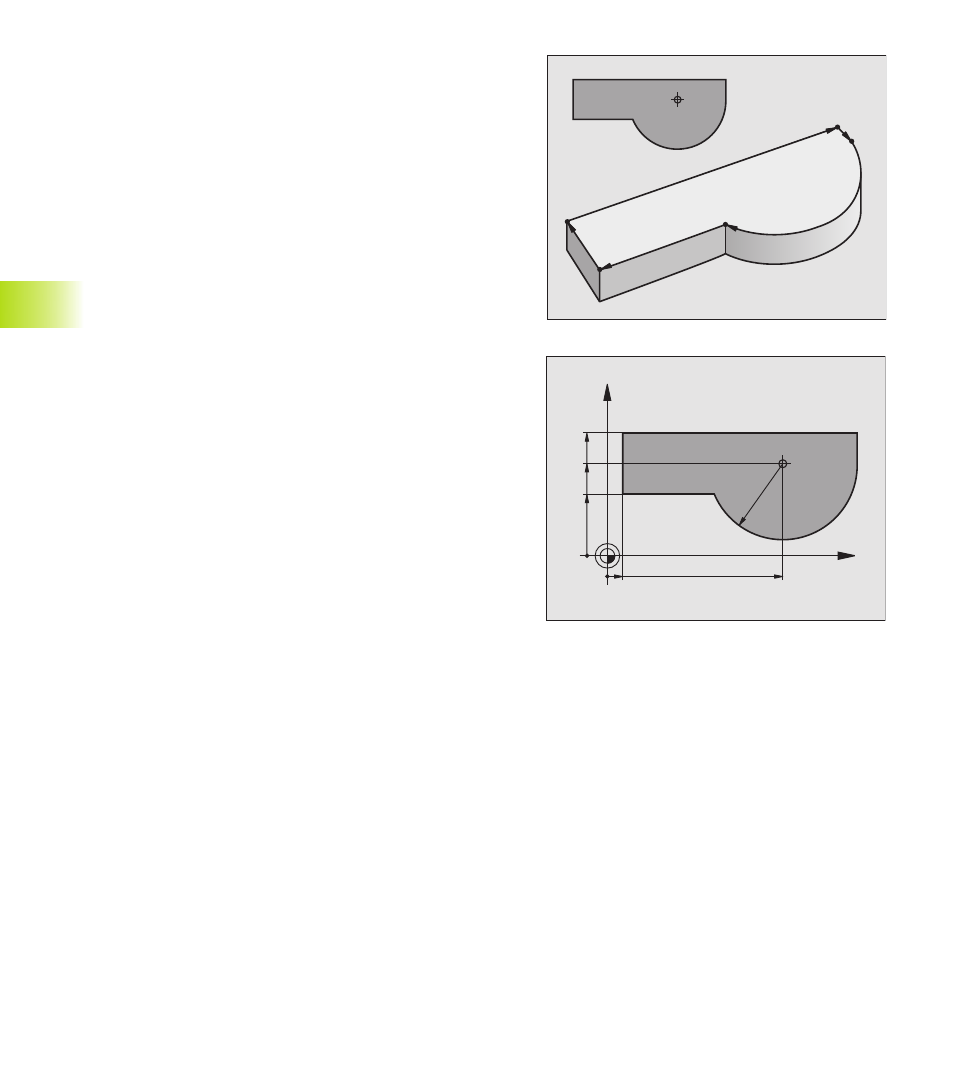
Tipos de trayectoria
El contorno de una pieza se compone normalmente de varias
trayectorias como rectas y arcos de círculo. Con los tipos de
trayectoria se programan los movimientos de la herramienta según
rectas y arcos de círculo.
Programación libre de contornos FK
Cuando no existe un plano acotado y las indicaciones de las
medidas en el programa NC están incompletas, el contorno de la
pieza se programa con la programación libre de contornos. El TNC
calcula las indicaciones que faltan.
Con la programación FK también se programan movimientos de la
herramienta según rectas y arcos de círculo.
Funciones auxiliares M
Con las funciones auxiliares del TNC se controla
■
la ejecución del programa, p.ej. una interrupción de la ejecución
■
las funciones de la máquina, como la conexión y desconexión del
giro de la herramienta y el refrigerante
■
la trayectoria de la herramienta
Subprogramas y repeticiones parciales de un pgm
Los pasos de mecanizado que se repiten, sólo se introducen una
vez como subprogramas o repeticiones parciales de un programa.
Si se quiere ejecutar una parte del programa sólo bajo determinadas
condiciones, dichos pasos de mecanizado también se determinan
en un subprograma. Además un programa de mecanizado puede
llamar a otro programa y ejecutarlo.
La programación con subprogramas y repeticiones parciales de un
programa se describe en el capítulo 9.
Programación con parámetros Q
En el programa de mecanizado se sustituyen los valores numéricos
por parámetros Q. A un parámetro Q se le asigna un valor numérico
en otra posición. Con parámetros Q se pueden programar funciones
matemáticas, que controlen la ejecución del programa o describan
un contorno.
Además con la ayuda de la programación de parámetros Q también
se pueden realizar mediciones durante la ejecución del programa
con un palpador 3D.
La programación con parámetros Q se describe en el capítulo 10.
L
L
L
CC
C
X
Y
R40
115
10
80
60
40
CC
6.1 Resumen: Movimientos de la hta.