HEIDENHAIN iTNC 530 (340 49x-02) ISO programming Manual del usuario
Página 221
HEIDENHAIN TNC iTNC 530
221
6.5 Mo
vimient
o
s de tr
a
y
ect
o
ri
a - Coor
denadas polar
e
s
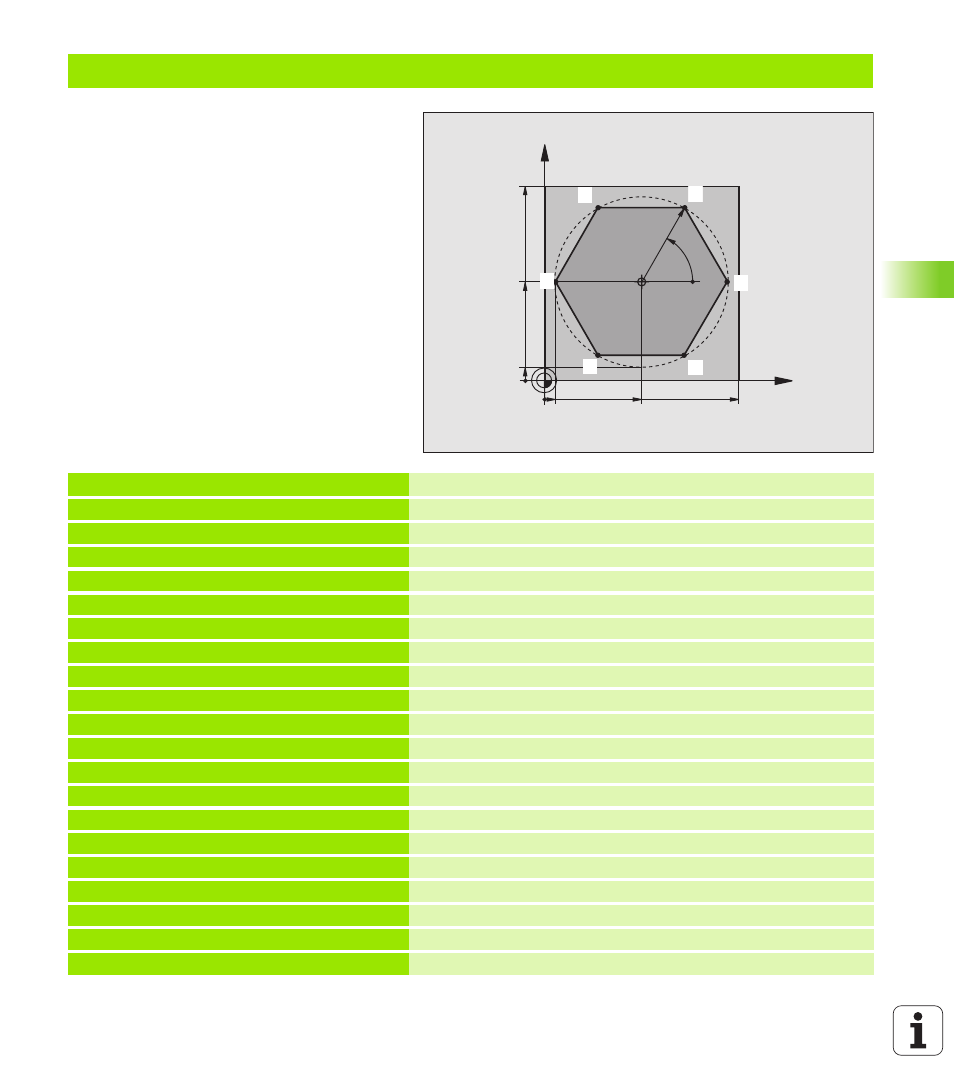
Ejemplo: Movimiento lineal en polares
%LINEALPO G71 *
N10 G30 G17 X+0 Y+0 Z-20 *
Definición pieza bruto
N20 G31 G90 X+100 Y+100 Z+0 *
N30 G99 T1 L+0 R+7,5 *
Definición de la herramienta
N40 T1 G17 S4000 *
Llamada de herramienta
N50 G00 G40 G90 Z+250 *
Definición del punto de referencia para las coordenadas polares
N60 I+50 J+50 *
Desplazar herramienta libremente
N70 G10 R+60 H+180 *
Posicionamiento previo de la herramienta
N80 G01 Z-5 F1000 M3 *
Desplazamiento a la profundidad de mecanizado
N90 G11 G41 R+45 H+180 F250 *
Llegada al punto 1 del contorno
N100 G26 R5 *
Llegada al punto 1 del contorno
N110 H+120 *
Llegada al punto 2
N120 H+60 *
Llegada al punto 3
N130 H+0 *
Llegada al punto 4
N140 H-60 *
Llegada al punto 5
N150 H-120 *
Llegada al punto 6
N160 H+180 *
Llegada al punto 1
N170 G27 R5 F500 *
Salida tangencial
N180 G40 R+60 H+180 F1000 *
Retirar la hta. del plano de mecanizado, cancelar la corrección de radio
N190 G00 Z+250 M2 *
Retirar la hta. en el eje de la misma, final del programa
N99999999 %LINEALPO G71 *
X
Y
50
100
50
I,J
5
100
R45
60°
5
1
1
1
2
1
3
1
4
1
5
1
6