Yaskawa VS-616PC5/P5 Manual del usuario
Página 80
80
VS-616PC5/P5 Manual del usuario
Capítulo 3 - Funciones de programación
Entradas y salidas
•
Comando arriba/abajo (configuración: n039 = "25")
Con el comando de marcha FWD (REV) ingresado, se realiza un cambio de la
frecuencia mediante el ingreso de las señales Arriba o Abajo a las terminales S5
y S6 del circuito de control, de tal forma que la operación pueda realizarse a la
velocidad deseada. Cuando los comandos Arriba/Abajo se especifican mediante
n039
, toda función que se configure en
n038
se desactiva; la terminal S5 se
convierte en la terminal de entrada para el comando Arriba y la terminal S6 se
convierte en la terminal de entrada para el comando Abajo.
Notas:
1)
Al seleccionar el comando UP/DOWN (ARRIBA/ABAJO), la velocidad
límite superior se configura independientemente de la referencia de
frecuencia.
Velocidad límite superior = Frecuencia de salida máxima (n012)
x Límite superior de la referencia de frecuencia
(n030)/100
2)
El valor del límite inferior es la frecuencia analógica de las terminales FV o
FI del circuito de control, o bien el límite inferior de la referencia de frecuen-
cia (n031), el que resulte mayor.
3)
Al ingresar el comando de marcha FWD (REV), la operación comienza a la
velocidad límite inferior, sin un comando ARRIBA/ABAJO.
4)
Si se ingresa la referencia de la frecuencia de control manual mientras el
mando opera mediante el comando ARRIBA/ABAJO, la referencia de la fre-
cuencia de control manual tiene prioridad.
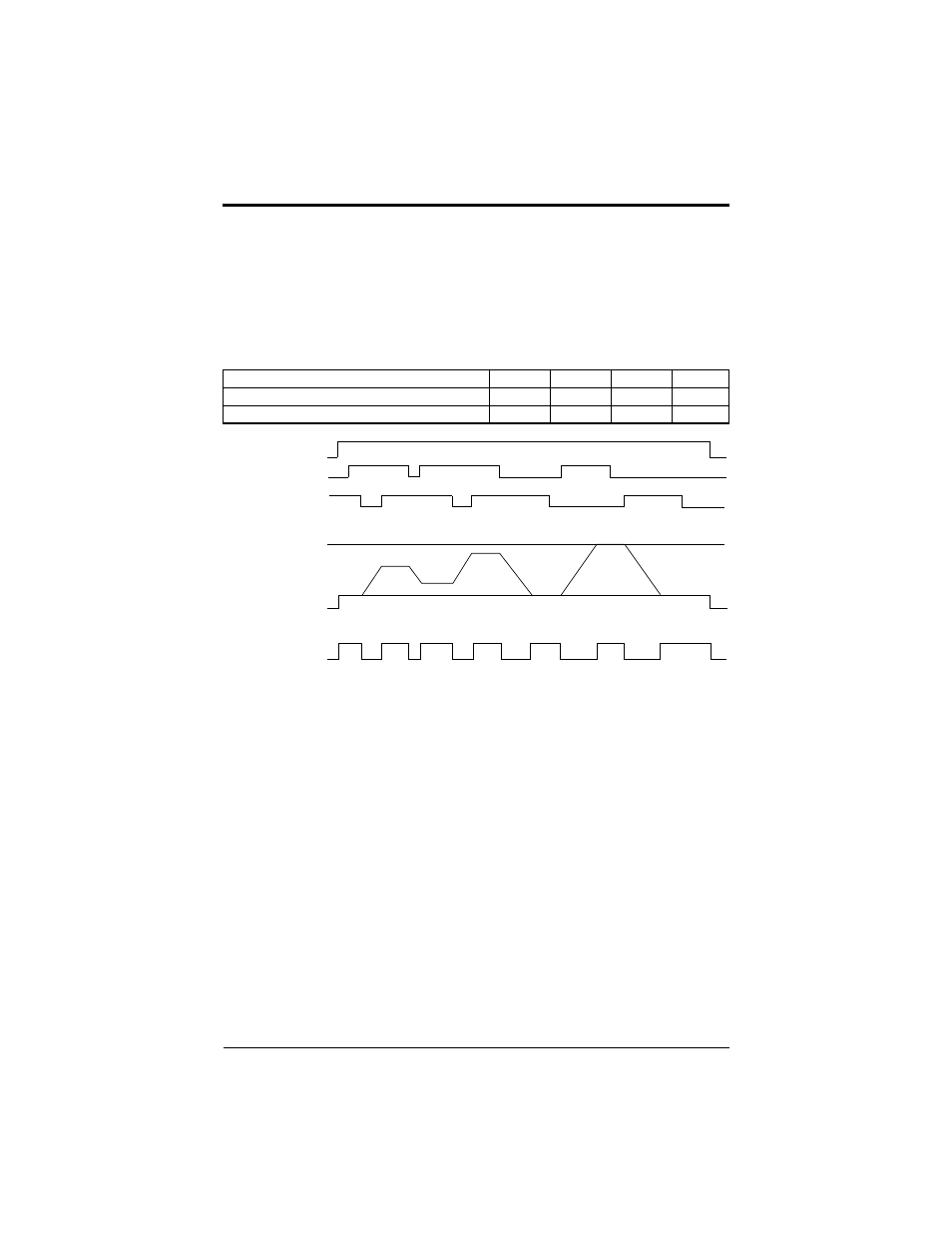
Terminal S5 del circuito de control (comando ARRIBA)
Cerrado
Abierto
Abierto
Cerrado
Terminal S6 del circuito de control (comando ABAJO)
Abierto
Cerrado
Abierto
Cerrado
Estado de la operación
Acelerac.
Desacel.
Retenc.
Retenc
Figura 52 Diagrama de temporización de la entrada del comando
Marcha FWD
Comando S5 ARRIBA
Comando S6 ABAJO
Velocidad límite
Frecuencia de salida de
velocidad límite inferior
Señal de la velocidad
D H U
U1
D1
D1
D
D
D
H
H
H
H
H
U
U
H
U: Estado “arriba” (aceleración)
D: Estado “abajo” (desaceleración)
H: Estado de “retención” (velocidad constante)
UI:Estado “arriba”, con retención en el límite superior de velocidad
DI:Estado “abajo”, con retención en el límite superior de velocidad
superior
acordada
ARRIBA/ABAJO