Aplicación, Euler, Tres ángulos euler: precesión ( eulpr ) – HEIDENHAIN iTNC 530 (340 49x-01) Manual del usuario
Página 462
462
9 Programación: Funciones especiales
9.4 Definir el plano de mecanizado me
diant
e
ángulos de Euler: PLANE EULER
9.4
Definir el plano de mecanizado
mediante ángulos de Euler:
PLANE EULER
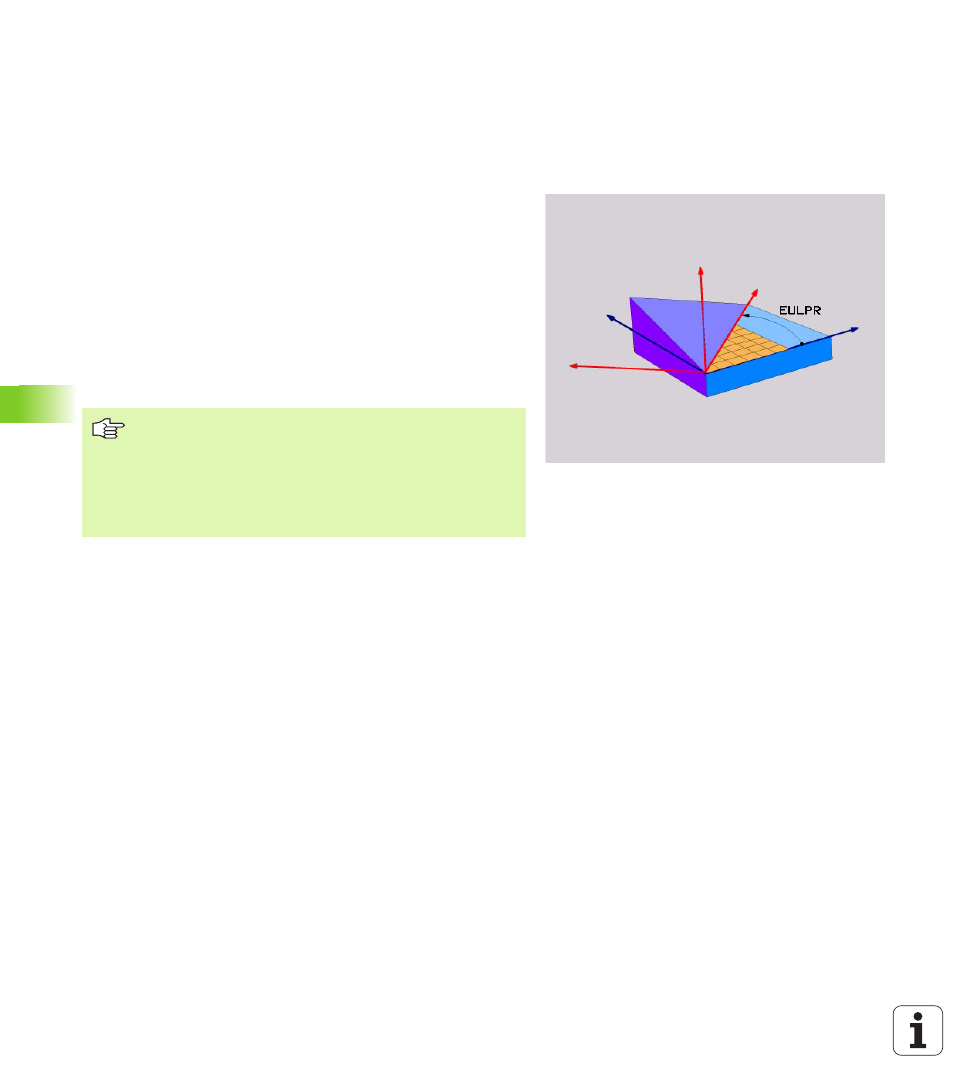
Aplicación
Los ángulos de Euler definen un plano de mecanizado en función de
hasta tres giros sobre el sistema de coordenadas inclinado
respectivamente. Los tres ángulos de Euler fueron definidos por el
matemático suizo Euler. Trasladados al sistema de coordenadas de la
máquina se generan los siguientes significados:
Angulo de
precesión EULPR
Giro del sistema de coordenadas sobre el eje Z
Angulo de nutación
EULNU
Giro del sistema de coordendas sobre el eje X
rotado por el ángulo de precesión
Angulo de rotación
EULROT
Giro del plano de mecanizado inclinado sobre el
eje Z inclinado
Antes de la programación deberá tenerse en cuenta:
La secuencia de giros descrita anteriormente es váida
independientemente del eje de la herramienta activo.
Descripción de parámetros para el comportamiento de la
posición: Véase "Determinar el comportamiento de
posicionamiento de la función PLANE", pág. 470.