BECKHOFF KL6904 Manual del usuario
Página 41
Funcionamiento
KL6904
39
4.2.11 Comunicación entre controladores TwinCAT
En la comunicación entre dos o más controladores TwinCAT mediante variables de red se utilizan los
tipos de datos MASTER_MESSAGE y SLAVE_MESSAGE.
En los controladores de la comunicación hay que crear las variables correspondientes en Publisher y
Subscriber.
En la comunicación TwinSAFE, un lado es maestro y el otro esclavo.
De ese modo, existen los tipos de datos siguientes:
Maestro TwinSAFE Publisher
MASTER_MESSAGE
Maestro TwinSAFE Subscriber
SLAVE_MESSAGE
Esclavo TwinSAFE Publisher
SLAVE_MESSAGE
Esclavo TwinSAFE Subscriber
MASTER_MESSAGE
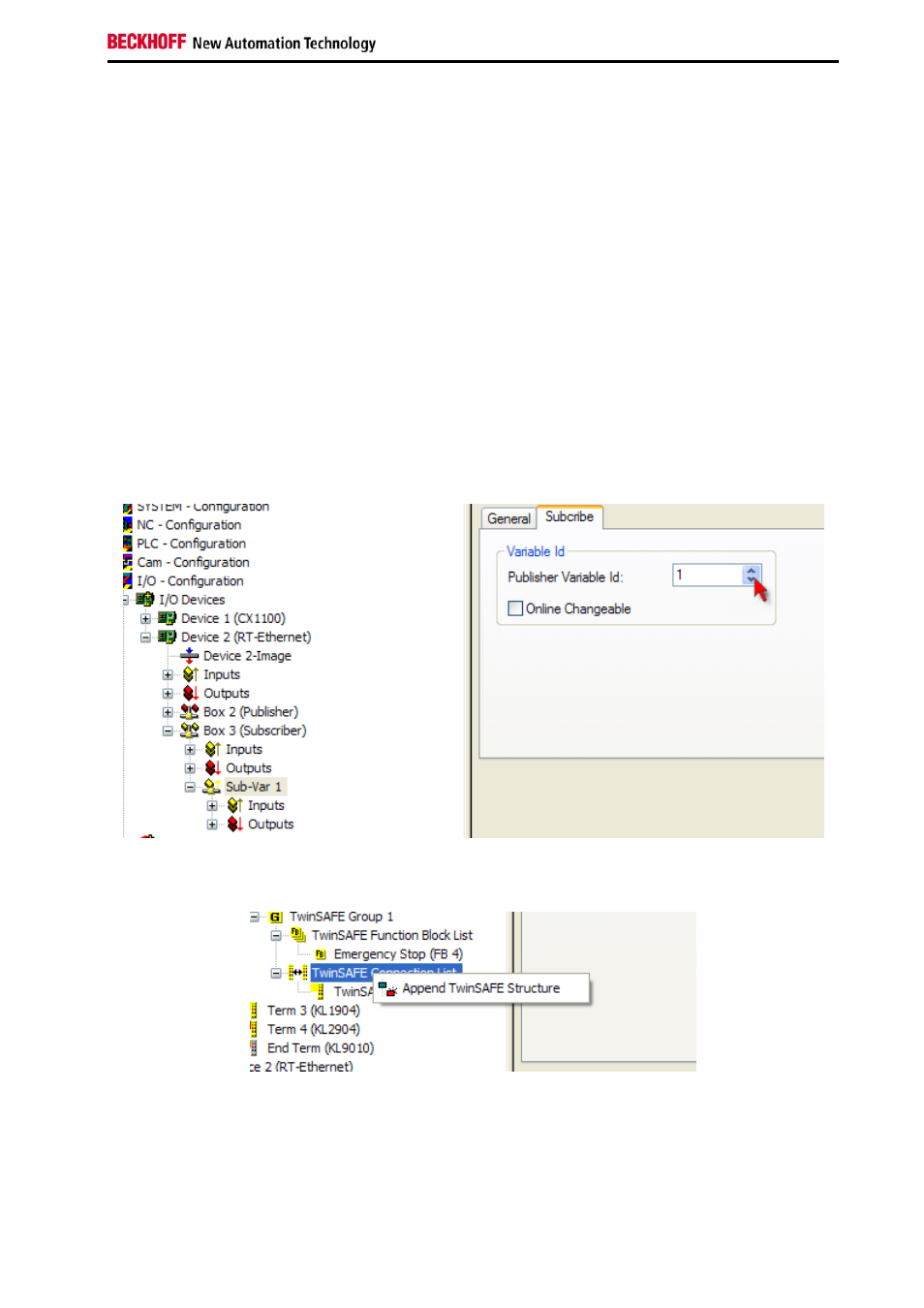
El enlace con el terminal TwinSAFE Logic KL6904 se produce mediante el siguiente cuadro de diálogo:
La conexión creada debe darse a conocer al terminal TwinSAFE Logic. Para ello se debe marcar la lista
TwinSAFE Connection List y apretar el botón derecho del ratón.
Se muestran las variables del tipo MASTER_MESSAGE y SLAVE_MESSAGE y deben marcarse las dos
(In/Out).
Haciendo clic en el botón OK (Aceptar) se acepta la selección.