HEIDENHAIN CNC Pilot 4290 Pilot Manual del usuario
Página 76
76
Ciclos de roscado
Rosca con trayectoria individual G33
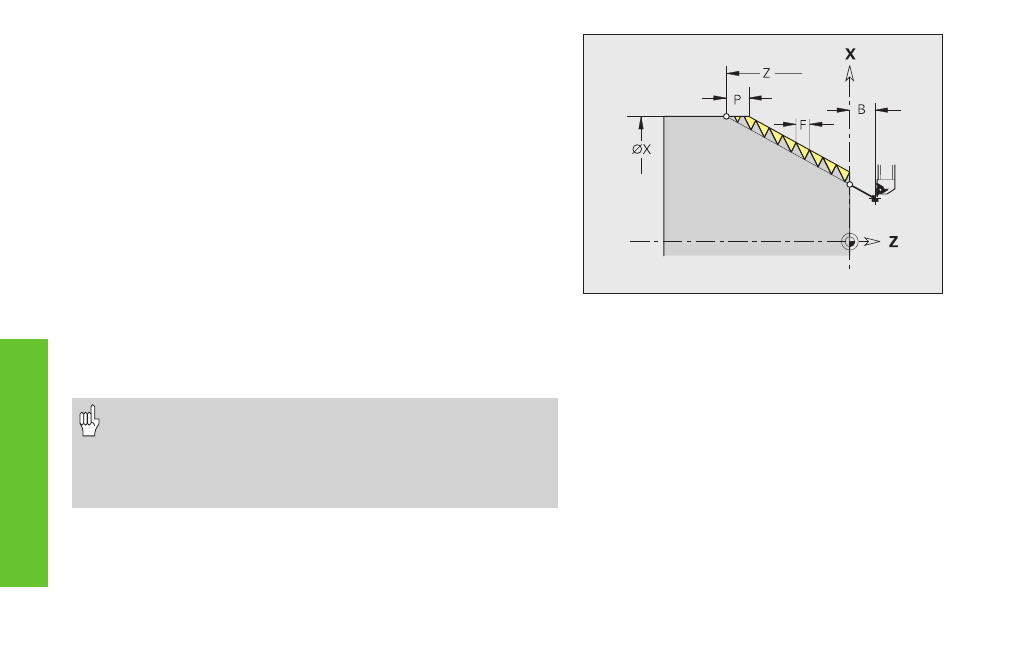
G33 mecaniza roscas en cualquier sentido y posición (longitudinal,
cónicas o transversales; roscados interiores y exteriores). La rosca
comienza en la posición de la herramienta y finaliza en “X,Z“.
Parámetros
X, Z: Diámetro, longitud punto final rosca (X medida del diámetro)
F:
Avance por vuelta (paso de roscado)
B, P: Longitud del recorrido inicial, longitud de sobrepaso – por defecto:
0 (véase G33)
C:
Ángulo de arranque – por defecto: 0
Q:
Número del cabezal
H:
Dirección de referencia para el paso de roscado – por defecto: 0
■
H=0: Avance en el eje Z (para roscas longitudinales y cónicas
hasta un máximo de +45°/–45° en el eje Z
■
H=1: Avance en el eje X (para roscas transversales y cónicas
hasta un máximo de +45°/–45° en el eje X
■
H=2: Avance en el eje Y
■
H=3: Avance de trayectoria
E:
Paso variable (amplia/reduce el paso por vuelta según el valor de
E) – por defecto: 0
• La “parada del avance“ actúa al final de un roscado.
• El override del avance no está activado.
• ¡No utilizar el override del cabezal cuando está desconectado
el control previo!
• Realizar la rosca con G95 (avance por vuelta).
Cálculo del “recorrido inicial/marcha por inercia de la rosca"
El carro precisa de un recorrido inicial antes de la rosca, para acelerar
hasta la velocidad de avance programada y de un recorrido de marcha
por inercia (también llamado “sobrepaso“) al final de la rosca para poder
detener el carro.
Cálculo de la longitud del recorrido inicial:
BA > 0,75 * (F*S)² / a + 0,15
Cálculo de la longitud de la marcha por inercia:
BE > 0,75 * (F*S)² / e + 0,15
BA:
Longitud mínima del recorrido inicial
BE:
Longitud mínima del recorrido por inercia
F:
Paso de rosca en mm/vuelta
S:
Revoluciones en vueltas/segundo
a, e:
Aceleración en mm/s² (a = “aceleración frase
inicial“; e = “aceleración frase final“ del
parámetro de máquina 1105, ff)