Definición de un vector normal – HEIDENHAIN TNC 620 (73498x-01) Manual del usuario
Página 394
394
Programación: Mecanizado multieje
1
1
.6 Cor
rección tr
idimensional de la her
ramienta (Opción de sof
tw
a
re
2)
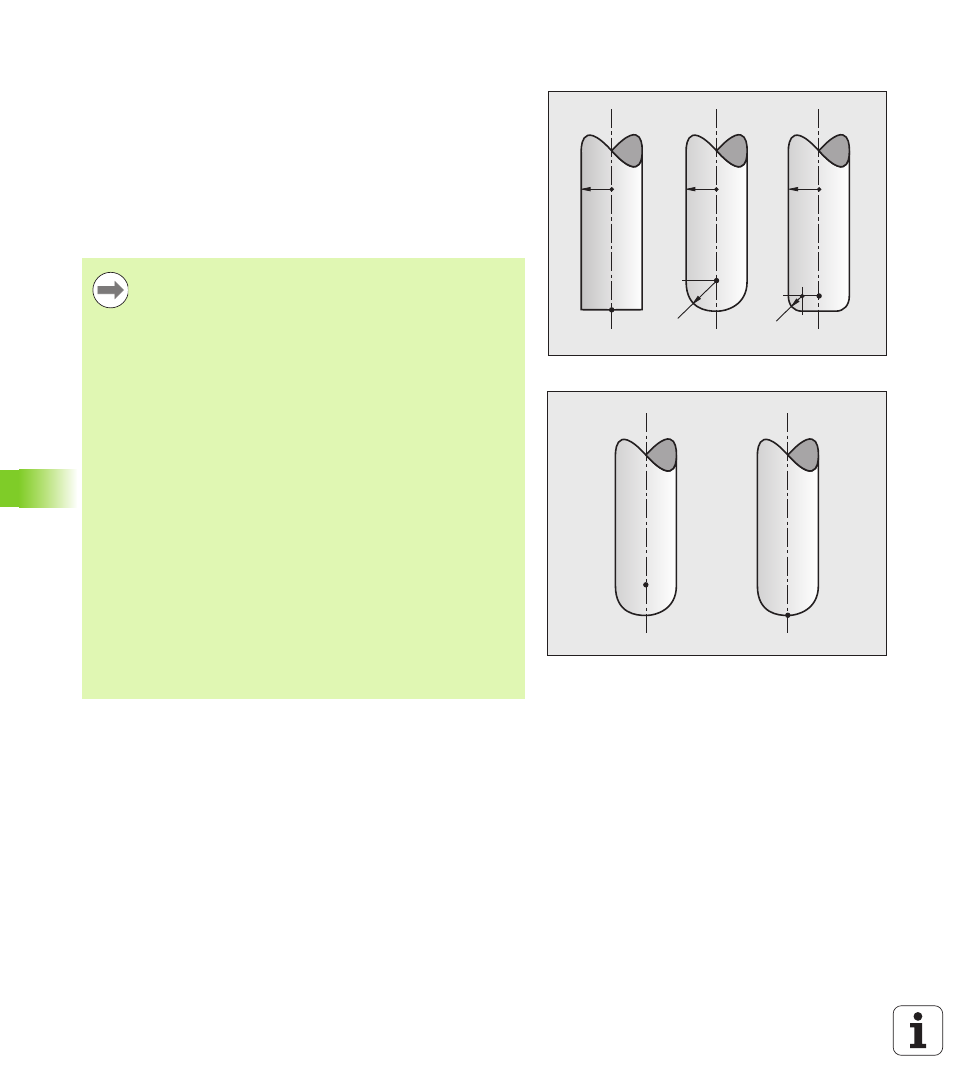
Definición de un vector normal
Un vector normal es una medida matemática que tienen el valor 1 y
una dirección cualquiera. En las frases LN el TNC precisa de hasta dos
vectores normales, uno para la dirección de la normal a la superficie y
otro (opcional), para determinar la dirección de la orientación de la
herramienta. La dirección de la normal a la superficie se determina
mediante los componentes NX, NY y NZ. En fresas cilíndricas y fresas
esféricas la dirección es perpendicular desde la superficie de la pieza
hacia el punto de ref. de la hta. P
T
, en fresas toroidales mediante P
T
'
o bien P
T
(véase la figura). La dirección de la orientación de la hta. se
determina mediante los componentes TX, TY y TZ
PT
R
R
R
R2
PT
PT
R2
PT'
P
T
P
SP
Las coordenadas para la posición X,Y, Z y para las
normales a la superficie NX, NY, NZ, o bien TX, TY, TZ,
deben tener la misma secuencia en la frase NC.
En la frase LN deben indicarse siempre todas las
coordenadas y todas las normales a la superficie incluso si
los valores en relación a la frase anterior no han variado.
Calcular los vectores normales los más exacto posible y
emitirlos con el nº correspondiente de dígitos después de
la coma a fin de evitar irrupciones de avance durante el
mecanizado.
La corrección 3D con normales a la superficie es válida
para la indicación de coordenadas en los ejes principales X,
Y, Z.
Cuando se cambia una herramienta con sobremedida
(valores delta positivos), el TNC emite un aviso de error. El
mensaje de error se puede quitar con la función M M107
(Véase "Definición de un vector normal" en pág. 394).
Cuando las sobremedidas de la herramienta perjudican el
contorno, el TNC no emite un aviso de error.
Mediante el parámetro de máquina toolRefPoint se
determina si el sistema CAM ha corregido la longitud de la
hta. mediante el centro de la bola P
T
o mediante el polo sur
de la bola P
SP
(véase la figura).