Límite integral (i) (n134), Ajuste de desplazamiento pid (n133), Parámetro de tiempo de demora primario pid (n135) – Yaskawa Varispeed mini V7 Manual del usuario
Página 112
112
•
Límite integral (I) (n134)
Este parámetro evita que el valor calculado del control integral exceda la cantidad
fijada. Normalmente, no hay necesidad de cambiar la configuración.
Reduzca la configuración si existe el riesgo de que se dañe la carga o de que el motor
pierda el paso por la respuesta el inversor cuando cambia la carga repentinamente. Si
la configuración se reduce demasiado, no concordarán el valor objetivo y el valor de
retroalimentación.
Configure este parámetro como un porcentaje de la frecuencia de salida máxima con la
frecuencia máxima como 100%.
•
Ajuste de desplazamiento PID (n133)
El parámetro n133 se ajusta al desplazamiento de control PID.
Si tanto el valor objetivo como el valor de retroalimentación están configurados en
cero, ajuste la frecuencia de salida el inversor en cero.
•
Parámetro de tiempo de demora primario PID (n135)
El parámetro n135 es la configuración del filtro de paso bajo para las salidas de control
PID.
Normalmente, no hay necesidad de cambiar la configuración.
Si la fricción viscosa del sistema mecánico es alta o si la rigidez es tan baja que causa
que resuene el sistema mecánico, incremente la configuración para que sea más alta
que el período de frecuencia de resonancia.
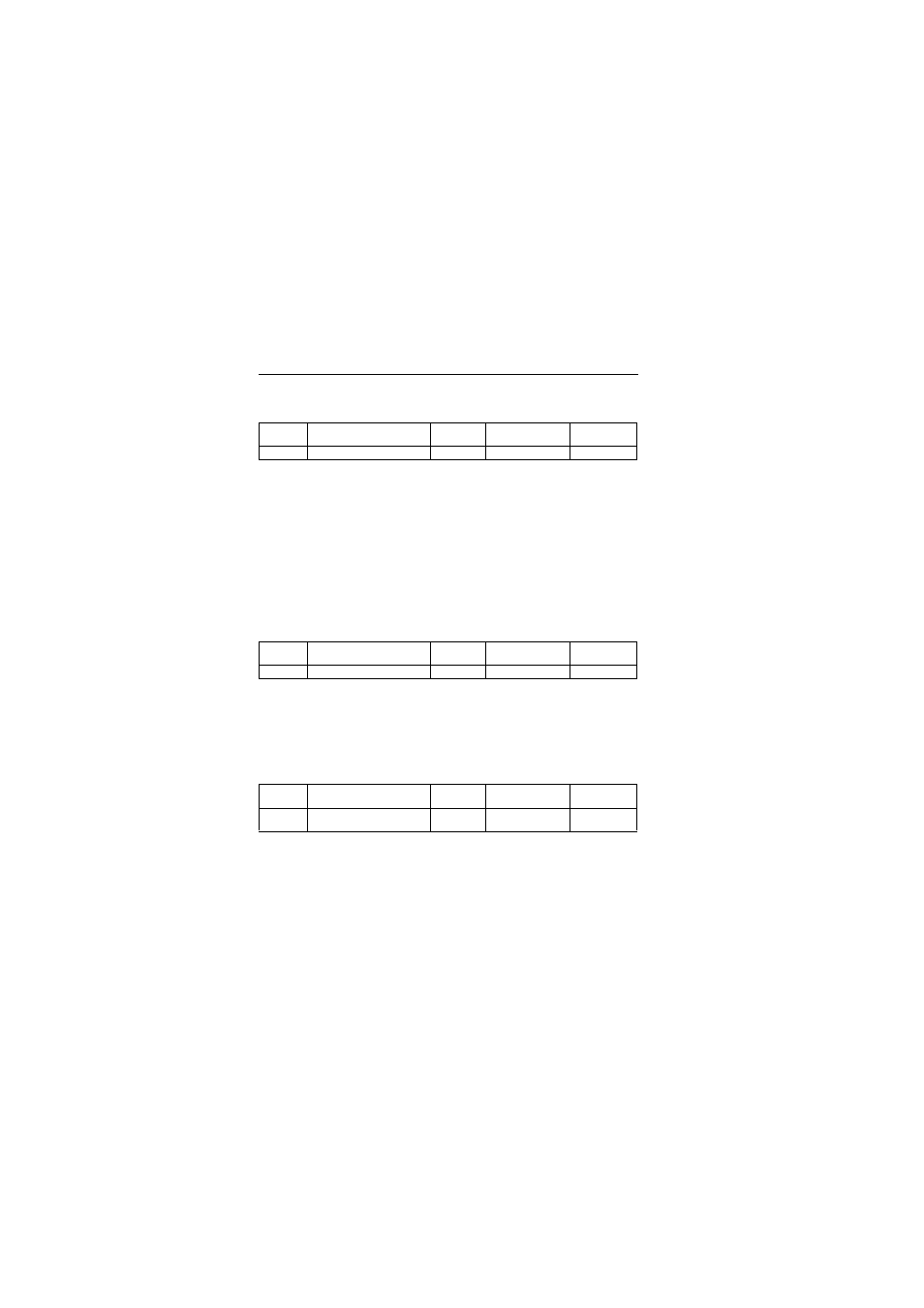
No. de
parámetro
Nombre
Unidad
Margen de
configuración
Configuración
inicial
n134
Límite integral (I)
%
De 0 a 100
100
No. de
parámetro
Nombre
Unidad
Margen de
configuración
Configuración
inicial
n133
Ajuste de desplazamiento PID
%
De -100 a 10.0
0
No. de
parámetro
Nombre
Unidad
Margen de
configuración
Configuración
inicial
n135
Parámetro de tiempo de demora
primario PID
Segundos
De 0.0 a 10.0
0.0