Control remoto y monitorización, 1 modo remoto "dbcan, 2 modo remoto "rib – d&b D12 Software Manual del usuario
Página 37
4.Control remoto y monitorización
1......8
1......8
Pin 1 n.c.
Pin 2 n.c.
Pin 3 n.c.
Pin 4 CAN_H
Pin 5 CAN_L
Pin 6 n.c.
Pin 7 RIB Data +
Pin 8 RIB Data -
Shield CAN Ground
1
8
. . . . . .
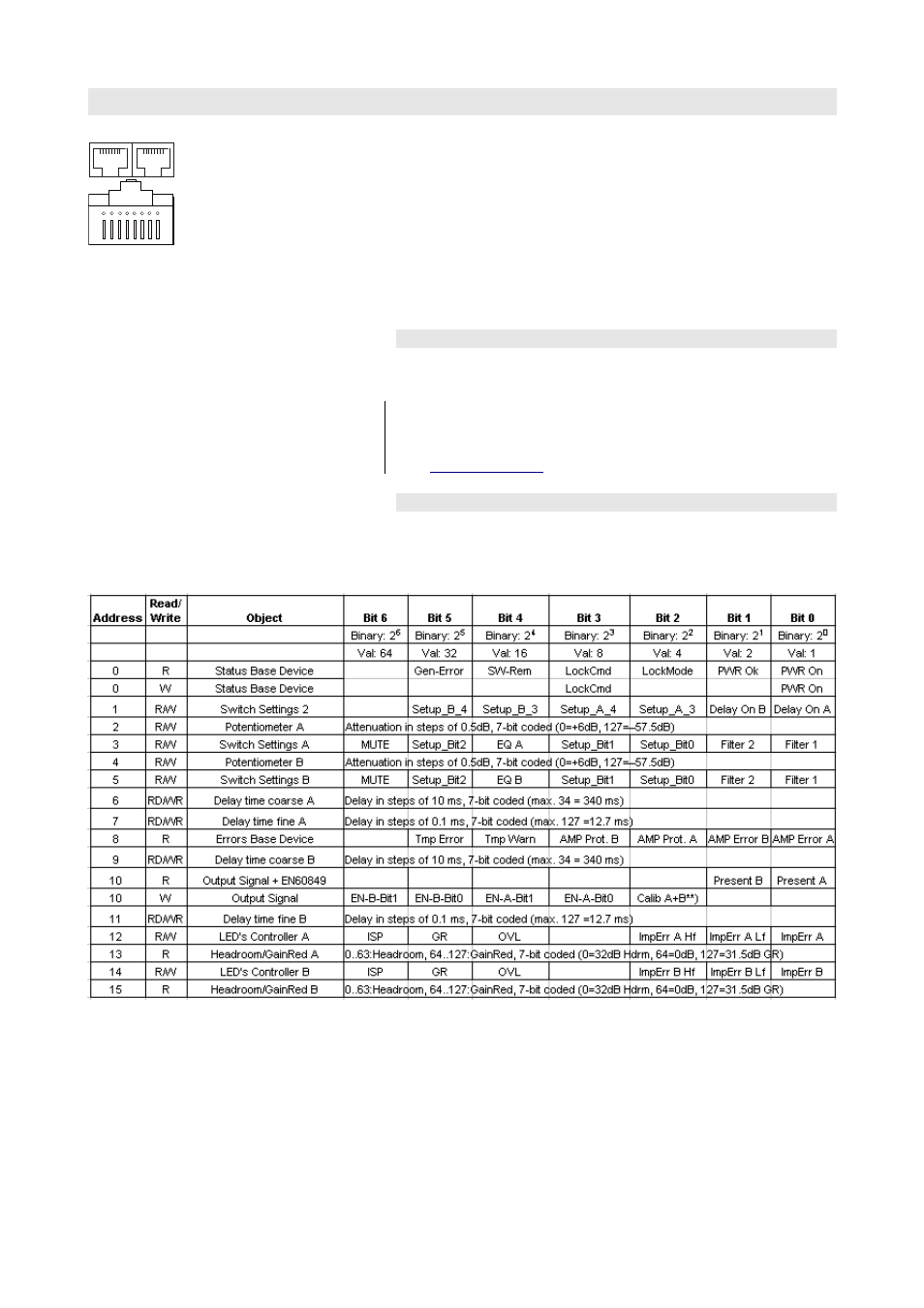
Fig. 11: Asignación de pins para el control
remoto (RJ45)
El D12 está provisto con una interfaz de control remoto serie de dos
hilos, (2 x RJ 45) que transportan las señales de RIB y CAN-Bus. Todos
los pins de ambos conectores están cableados en paralelo y permiten
que se utilicen como entrada o salida. Cuando la red de control remoto
toma forma de "topología de Bus o de Anillo", un conector se utiliza
para la señal entrante y el segundo conector permite la conexión
directa con otro dispositivo o para terminación en el caso de una red
CAN-Bus. Las conexiones de interfaz para RIB (pin 7/8) están
optoacopladas, mientras que las conexiones para CAN-Bus (pin 4/5)
están conectadas físicamente a masa (protección de puesta a tierra).
4.1
Modo remoto "dbCAN"
Todas las funciones del D12 se pueden consultar remotamente
mediante dbCAN (CAN-Bus).
Nota:
En el documento de información técnica TI 312 (código de d&b
D5312.E) se ofrece una descripción detallada del control remoto
mediante dbCAN (CAN-Bus) y se puede descargar en el sitio web de
d&b:
4.2
Modo remoto "RIB"
El D12 se puede consultar remotamente mediante Remote Interface
Bridge (RIB) de d&b. Consulte la dirección del objeto RIB en la tabla
siguiente.
Tab. 5: Tabla de direcciones de objetos RIB del D12
Amplificador D12Manual del software (Firmware V2.x.x) (5.5 ES)
Página 37 de 38